

System for testing comprehensive performance of reducer for robot joint
A comprehensive performance testing, robot joint technology, applied in the direction of machine gear/transmission mechanism testing, etc., to achieve the effect of good versatility, high testing accuracy and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing, test system of the present invention is further elaborated:
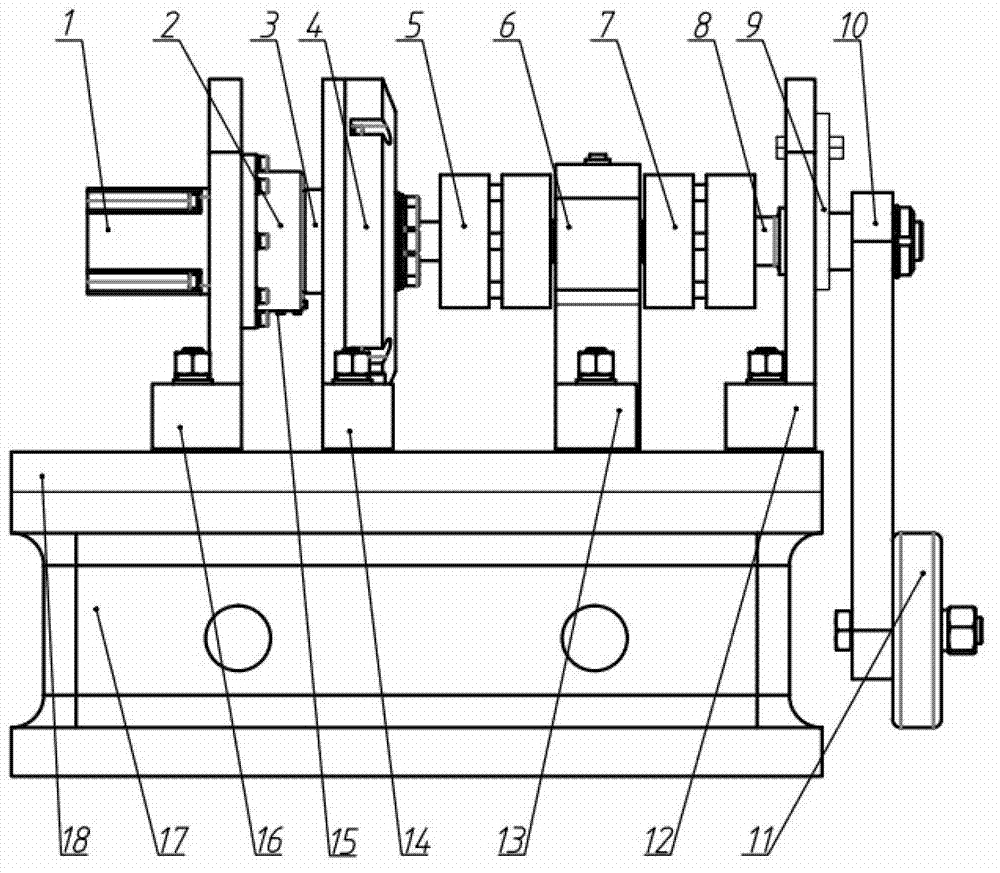
[0020] see figure 1 In the mechanical part, the output shaft of the servo motor 1 is directly connected to the input end of the tested reducer 2, and is fixed on the horizontal guide rail 18 through the first bracket 16, and the horizontal guide rail is fixed on the base 17. The tested reducer 2 is installed with a temperature The sensor 15 measures the temperature. The flange at the output end of the tested reducer 2 is connected to the following components through the first connecting shaft 3. The inner ring of the angle measuring device 4 is sleeved on the first connecting shaft 3 and fastened by a special nut. The outer ring of the angle measuring device 4 The ring is fixed on the horizontal guide rail 18 by the second support 14 . The first connecting shaft 3 is connected to the torque sensor 6 through the first coupling 5, the torque sensor 6 is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More