

Portable underwater marine environment monitoring glider
A marine environment monitoring and glider technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the tasks of continuous marine environmental monitoring and water quality data collection, inability to realize time and space marine environment monitoring, Observation areas are not controlled, etc., to achieve the effects of easy mass processing and manufacturing, low processing and operating costs, strong mobility and controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The embodiments of the present invention are described in detail below: the present embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation and specific operation process are provided, but the protection scope of the present invention is not limited to the following implementation example.
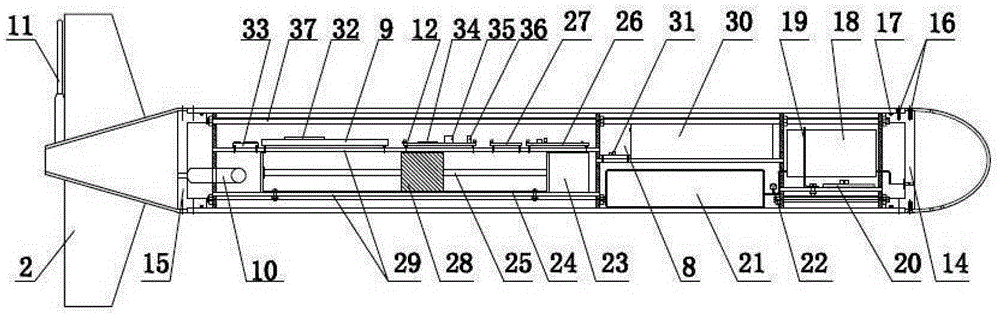
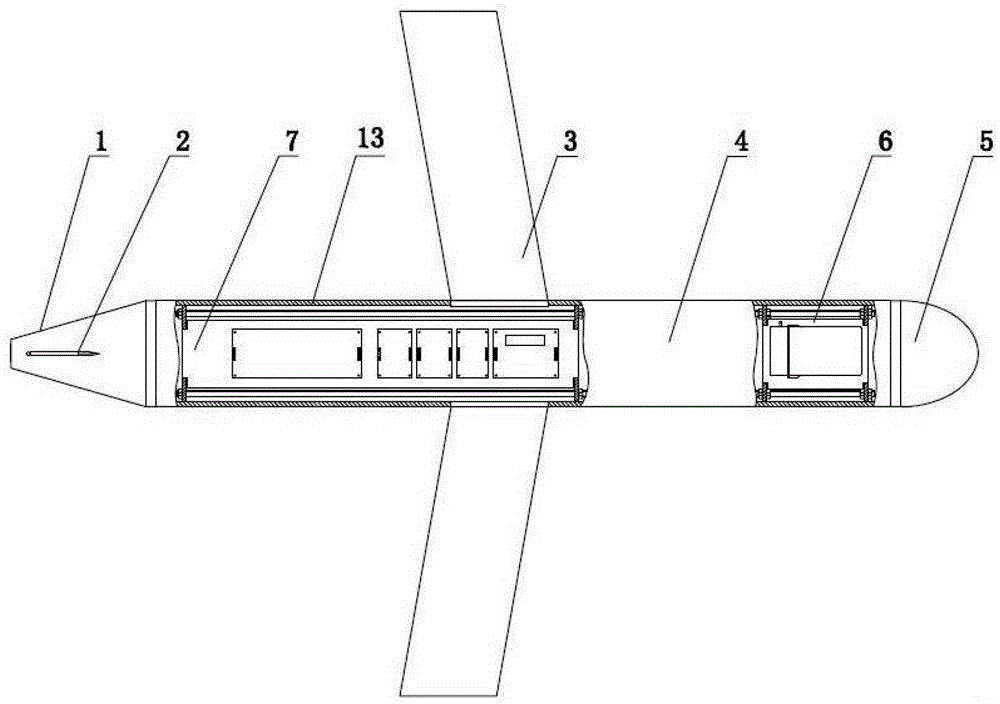
[0040] Such as figure 1 and 2 As shown, this embodiment includes an external profile structure, an antenna 11 arranged outside the external profile structure, and a center of gravity adjustment mechanism 7, a buoyancy adjustment mechanism 6, a power module 8, and a main control system 9 arranged inside the external profile structure and depth sensor 10, wherein:
[0041] - Antenna 11, used to transmit collected ocean water quality data and accept various control commands;
[0042] - The center of gravity adjustment mechanism 7 is used to adjust the center of gravity to generate the corresponding attitude angle in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More