

Bridge detecting robot based on negative-pressure absorption
A technology of bridge inspection and robot, which is applied in the direction of bridges, bridge construction, bridge parts, etc., can solve the problems of great influence of light and weather environment, potential safety hazards of bridge inspectors, safety and reliability, etc., to shorten the detection cycle , shorten the production cycle, and the effect of relatively large load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
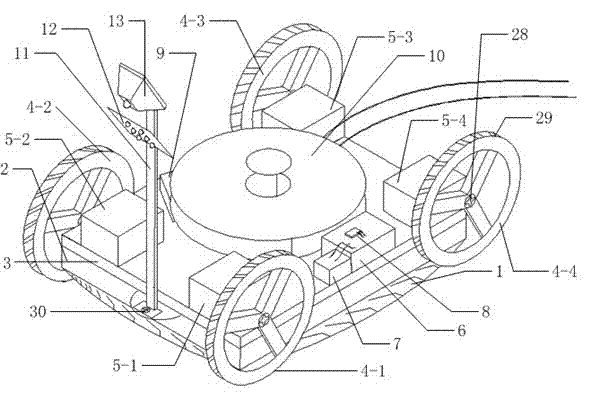
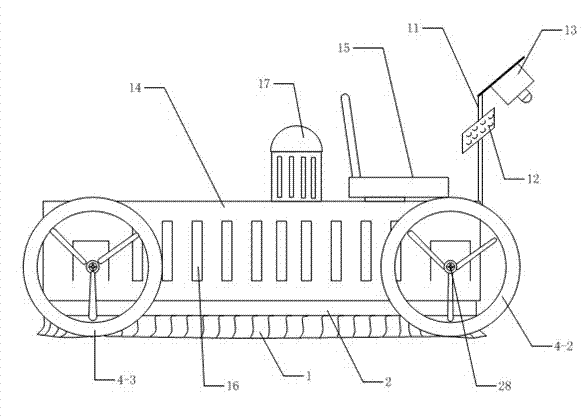
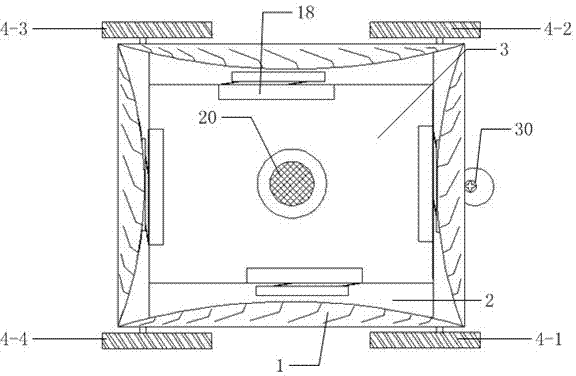
[0021] combine figure 1 and figure 2 , the bridge detection robot based on negative pressure adsorption in the present invention is composed of an adsorption control module, a motion control module, a disease detection module and a light outer casing 14, and the adsorption control module includes a sealed cavity, a negative pressure generating device, an air pressure sensor 7, Single-chip microcomputer main control board 6, wireless command transmission module 8, wireless command transmission module 34 and remote control device 33, the sealed cavity communicates with the negative pressure generating device, the pressure sensitive hose of the air pressure sensor 7 stretches into the sealed cavity, the air pressure sensor 7 and the wireless command The transmission module 8 is respectively connected to the main control board 6 of the single-chip microcomputer, the main control board 6 of the single-chip microcomputer is glued on the support base plate 3, and the ground remote c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More