

Autopilot for fixed-wing and four-rotor unmanned aerial vehicles
A technology of quadrotor UAV and autopilot, which is applied in the direction of three-dimensional position/course control, etc., can solve the problems of high cost and harsh sensor system requirements, and achieve the effect of low cost, easy software and hardware upgrade, and complete functions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
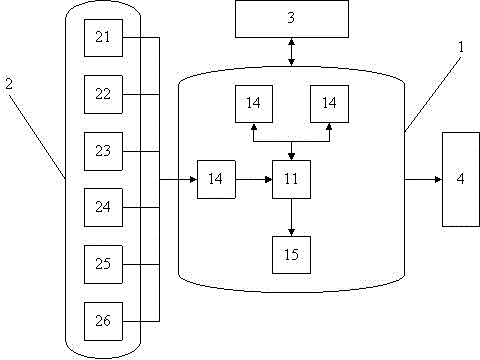
[0027] The autopilot for fixed-wing and quadrotor UAVs of this embodiment includes a microprocessor system 1, a sensor system 2 connected to the input end of the microprocessor system 1, and a wireless communication device connected to the two-way data terminal of the microprocessor system 1 An interface 3 and a control signal output interface 4 connected to the output of the microprocessor system 1;
[0028] Described microprocessor system 1 comprises ARM processor 11, ROM12 and RAM13 that are connected with ARM processor 11 bidirectional data end, the AD converter 14 that is connected with ARM processor 11 input end and is connected with ARM processor 11 output end JTAG interface 15;
[0029] Described sensing system 2 is connected with AD converter 14 in microprocessor system 1, comprises attitude detector 21, height detector 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More