

Method and device for displacement computing and method and device for simultaneous localization and mapping
A map construction and displacement technology, applied in the field of displacement calculation, can solve problems such as low precision, complicated and expensive electric machinery design and production, achieve high data accuracy and processing time, reduce maintenance complexity, and reduce maintenance costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] Various preferred embodiments of the present invention will be described below with reference to the accompanying drawings. The following description with reference to the accompanying drawings is provided to assist understanding of example embodiments of the invention as defined by the claims and their equivalents. It includes various specific details to aid in understanding but they are to be regarded as exemplary only. Accordingly, those of ordinary skill in the art will recognize that various changes and modifications of the embodiments described herein can be made without departing from the scope and spirit of the invention. Also, detailed descriptions of functions and constructions well-known in the art will be omitted to make the description clearer and more concise.
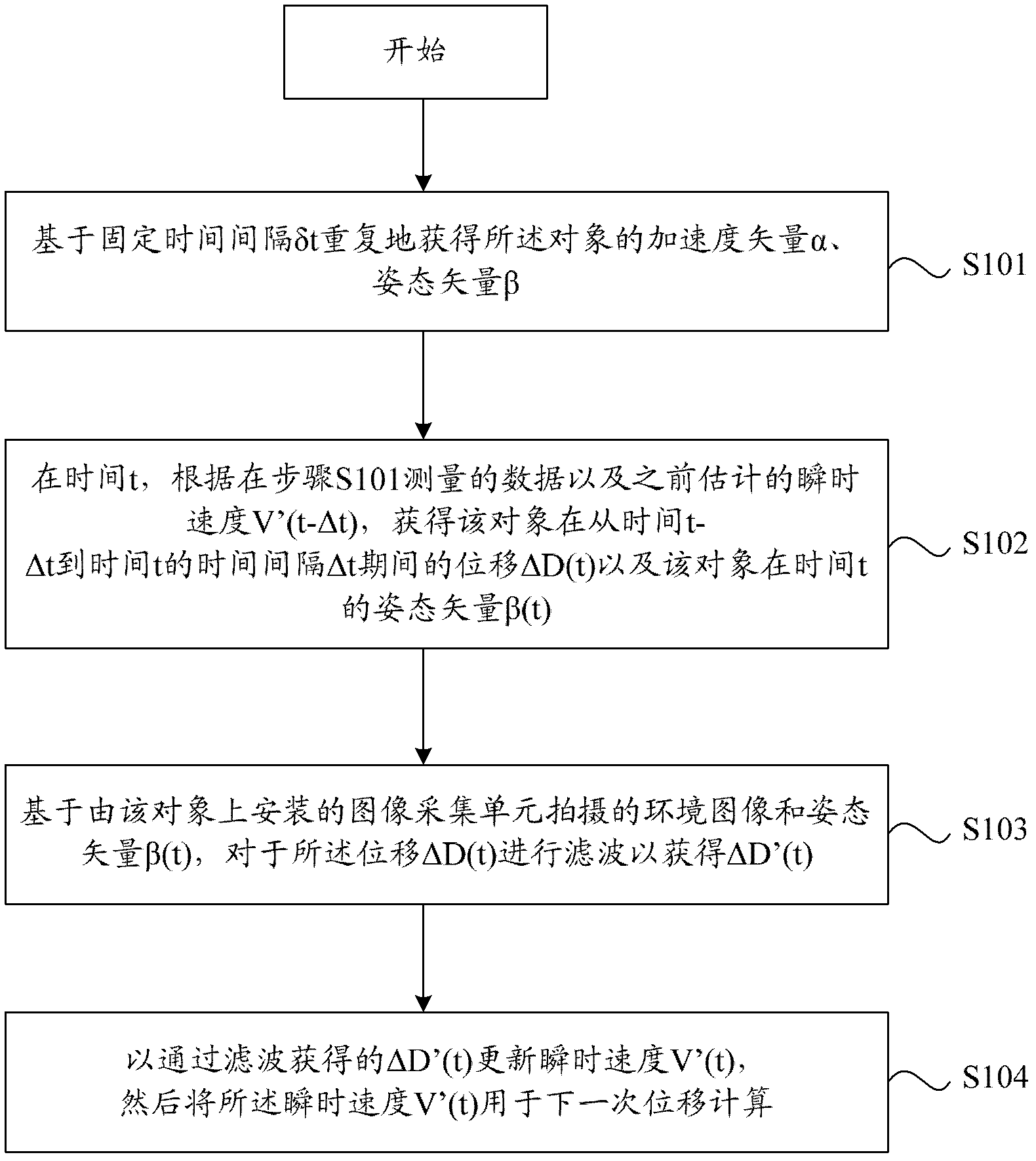
[0033] First, refer to figure 1 A method for calculating the displacement of an object (eg, a robot or a handheld device) in a spatially unknown environment applied in simultaneous localization a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More