

Optical calibration method of ultrasonic probe
A calibration method, ultrasonic technology, applied in the field of optical calibration, can solve problems such as low adaptability, complex equipment, and restricted activities, and achieve the effects of clear physical meaning, reduced complexity, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
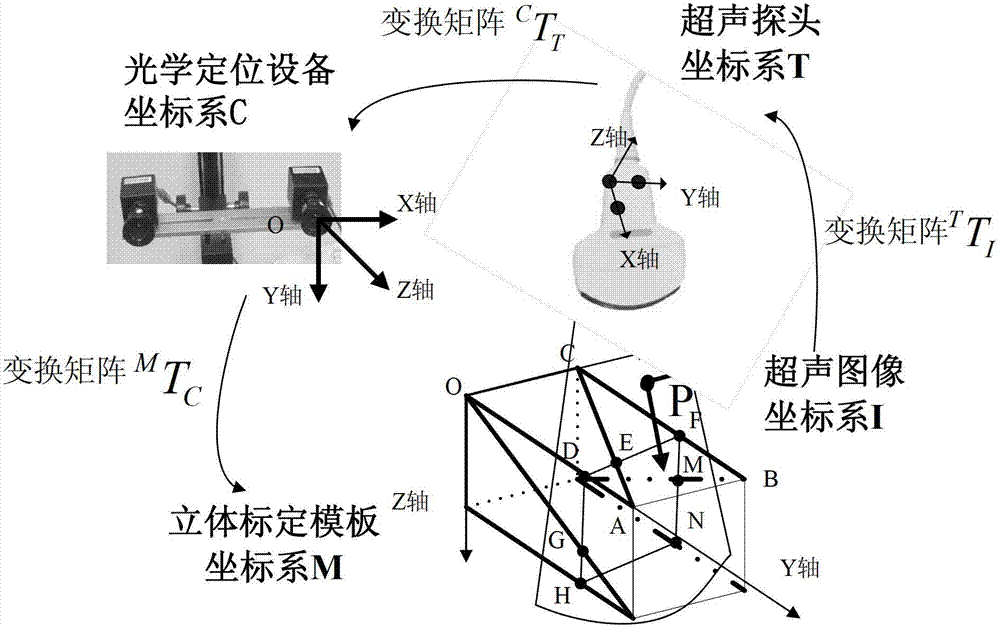
[0038] Such as Figure 1-5 Shown: a calibration method of ultrasonic probe:
[0039] one. Setting of the coordinate system C of the optical positioning device: select two identical cameras whose optical axes are parallel to each other as the optical positioning device. Such as figure 1 As shown, two identical cameras are equipped with the same type of lens, and preferably, they are fixed on a fixed frame arranged horizontally.
[0040] Further, in order to meet different calibration ranges, the two cameras are movably connected to the fixed frame, that is, the distance between the optical centers of the two cameras, that is, the baseline distance, is set to be adjustable, and the optical axes of the two cameras are clamped The angle can also be adjusted to meet the calibration needs of different orientations.
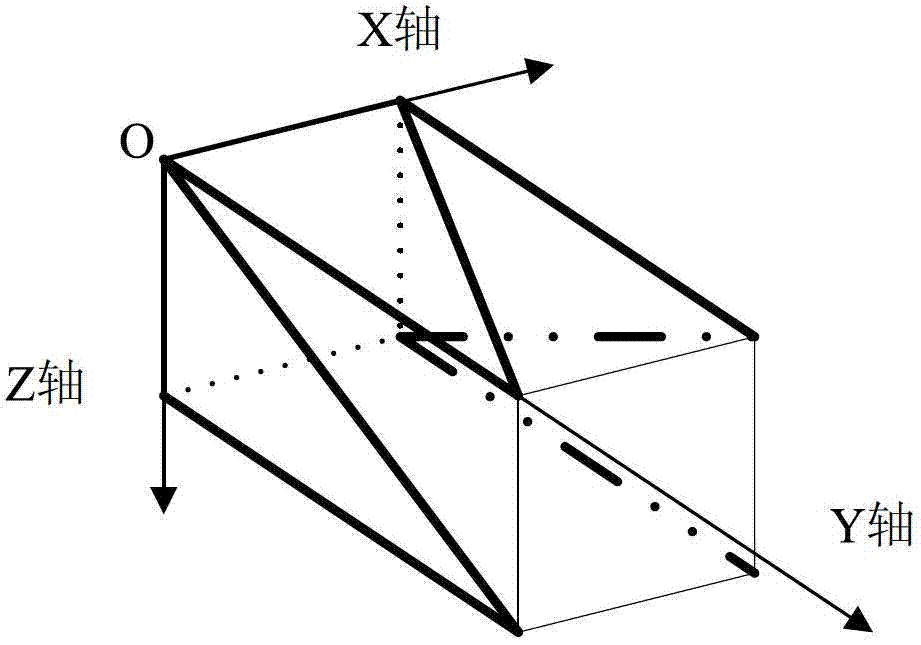
[0041] After fixing the optical instrument, usually, choose the optical center of the left camera as the axis, the baseline of the two cameras as the X axis, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More