

Angle increment optimization method for rolling pendulum seeker tracking loop
A technology of tracking loops and optimization methods, applied in non-electric variable control, position/direction control, instruments, etc., can solve problems such as large input information, rising cost, and complex system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
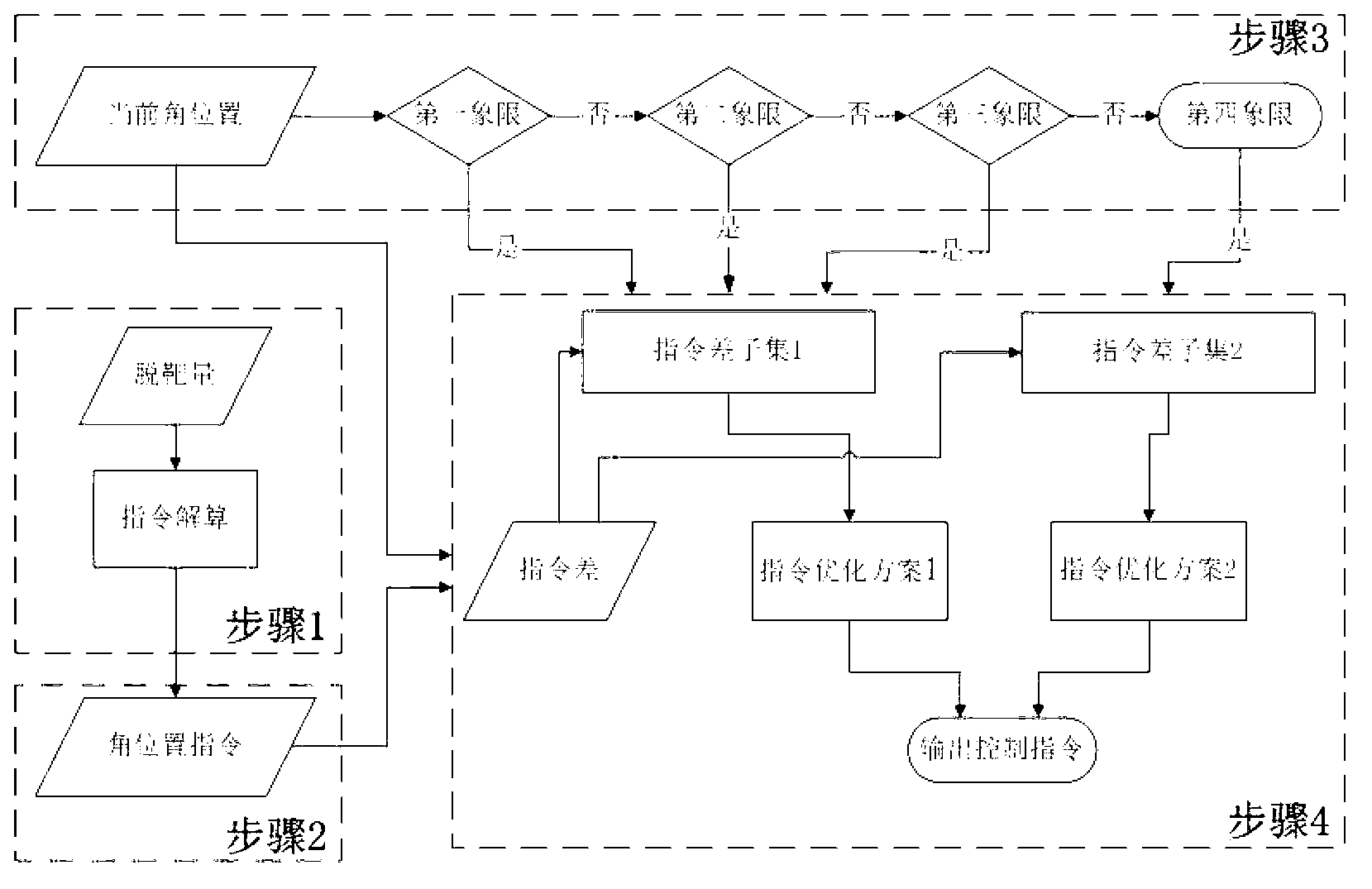
[0046] Invention idea of the present invention is:
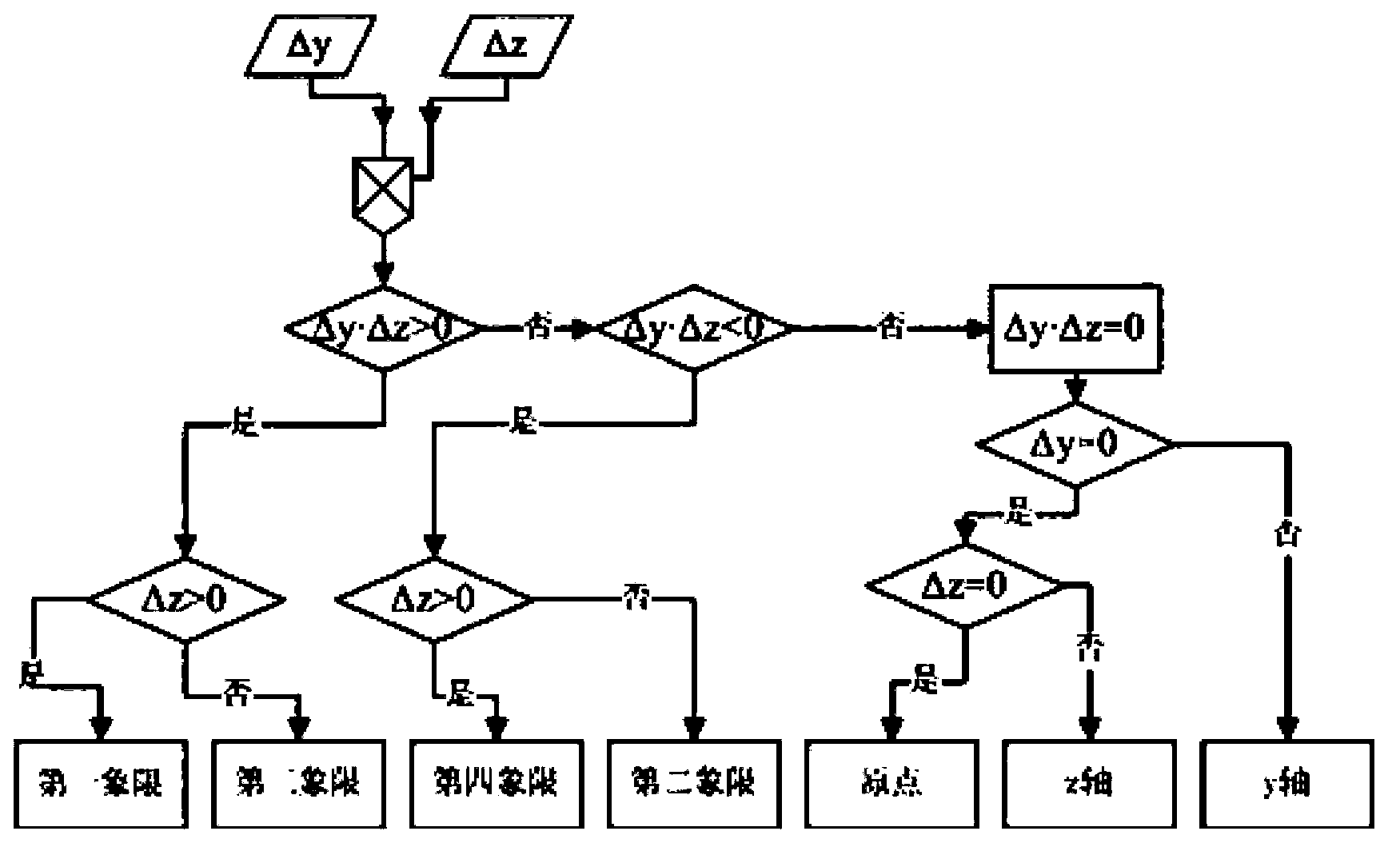
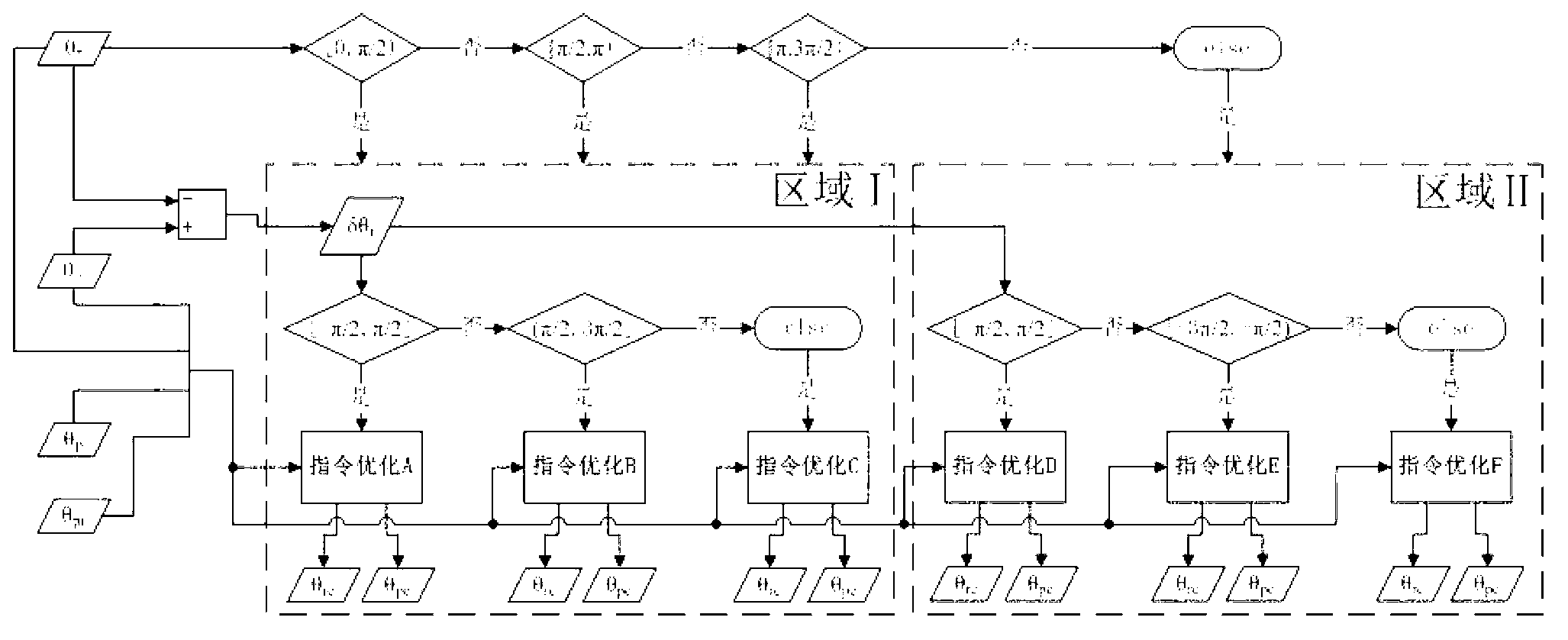
[0047] The commonly used target surface shapes of roll-swing seeker image detectors are rectangular and circular. The bullseye is located at the geometric center of the target surface, and the pixel representation of the coordinate value of the target in the Cartesian coordinate system of the target surface is the amount of miss. According to the coordinate definition of the missile, the horizontal and vertical misses on the target surface are defined as Δy and Δz respectively, and the unit is the number of pixels. The pixel size of the detector is expressed as μ, and the unit is mm. In the case of a relatively small misalignment angle, the control angle increments of the roll and swing frames can be expressed by the arctangent function,
[0048] Δθ r = arctan ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More