

Switching method of position-sensor-free direct torque motor control system
A torque motor and control system technology, applied in control systems, electronic commutation motor control, electrical components, etc., can solve problems such as poor stability, impact, and inability to obtain accurate rotor positions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
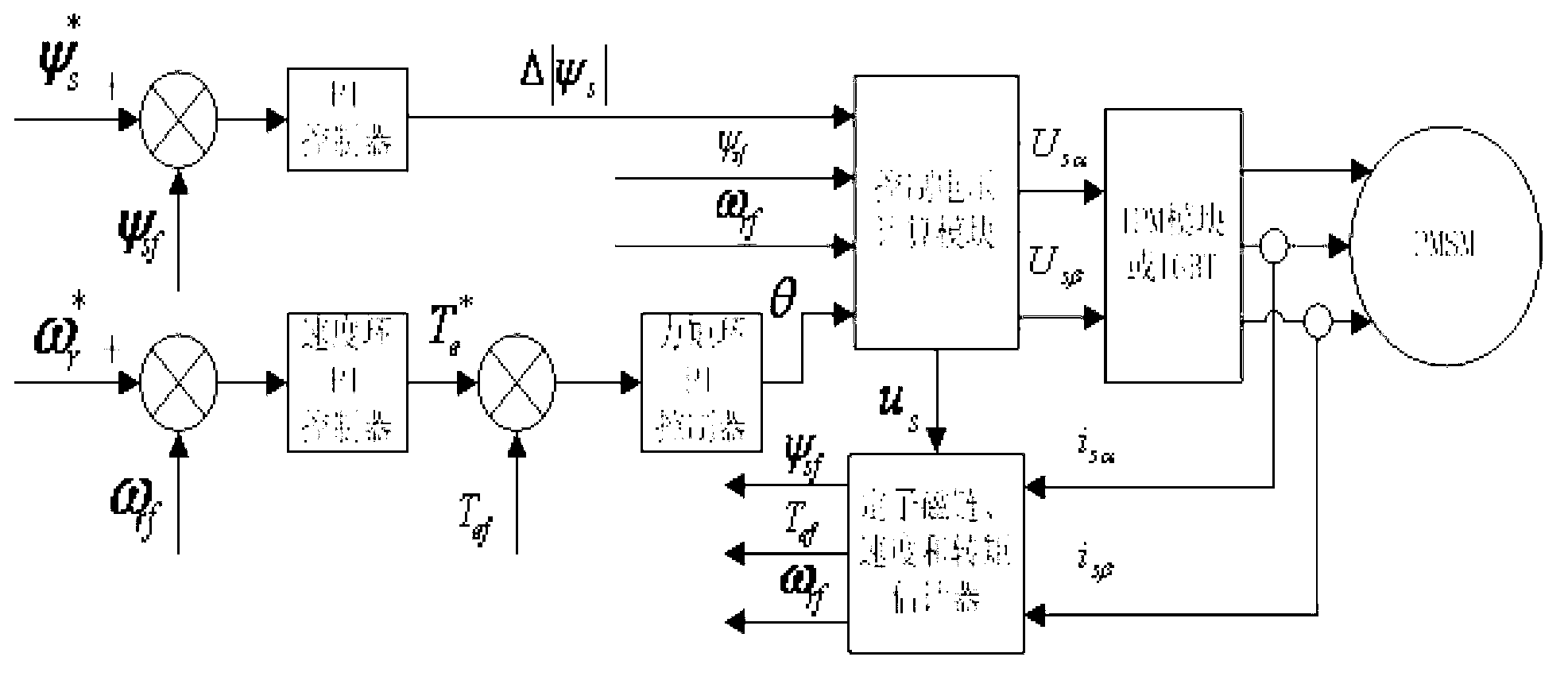
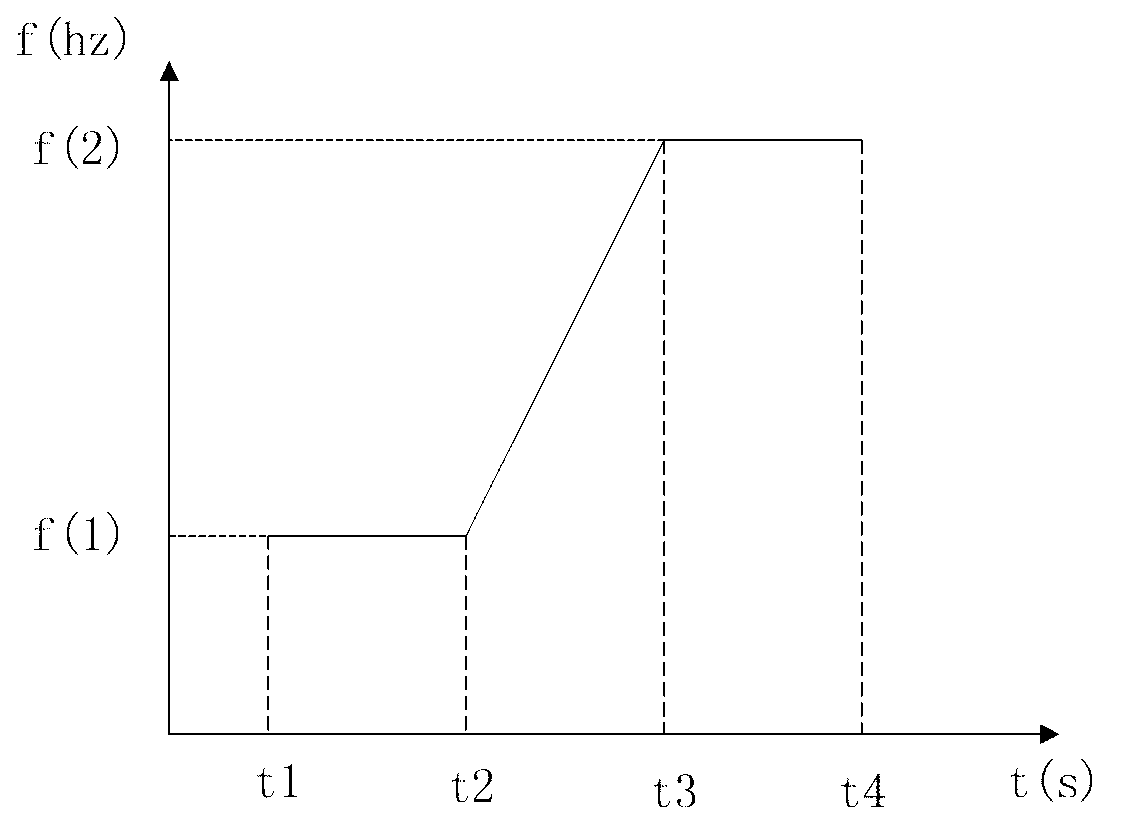
[0056] Embodiment 1, see figure 1 As shown, a switching method of a position sensorless direct torque motor control system, wherein: a non-disturbance switching section is added in the switching process between the open-loop control starting state and the closed-loop control running state, and the non-disturbance switching section refers to During the switching period t3-t4, the switching frequency f2 is maintained to obtain the estimated quantities of various parameters required for the closed-loop control operation of the motor, and to prepare for the motor from its open-loop control starting state to the closed-loop control running state. The estimated parameters are used as the corresponding control parameters of the closed-loop control operation of the motor to realize the undisturbed switching of the motor from the open-loop control starting state to the closed-loop control running state.
Embodiment 2
[0057] Embodiment 2, see figure 1 As shown, a switching method of a position sensorless direct torque motor control system, wherein: the estimated parameters of each parameter include stator flux linkage, electromagnetic torque and rotor speed; the corresponding control parameters of the closed-loop control operation of the motor Including the initial value of the stator flux linkage vector amplitude setting value, the initial value of the integral item of the speed loop and the initial value of the integral item of the torque loop, the rest are the same as the first embodiment.
Embodiment 3
[0058] Embodiment 3, as figure 1 As shown, a switching method of a position sensorless direct torque motor control system, wherein: the motor is a permanent magnet synchronous motor PMSM, and the specific steps of the non-disturbance switching section are:
[0059] (1) The non-disturbance switching section maintains the switching frequency f2 during the switching period t3-t4;
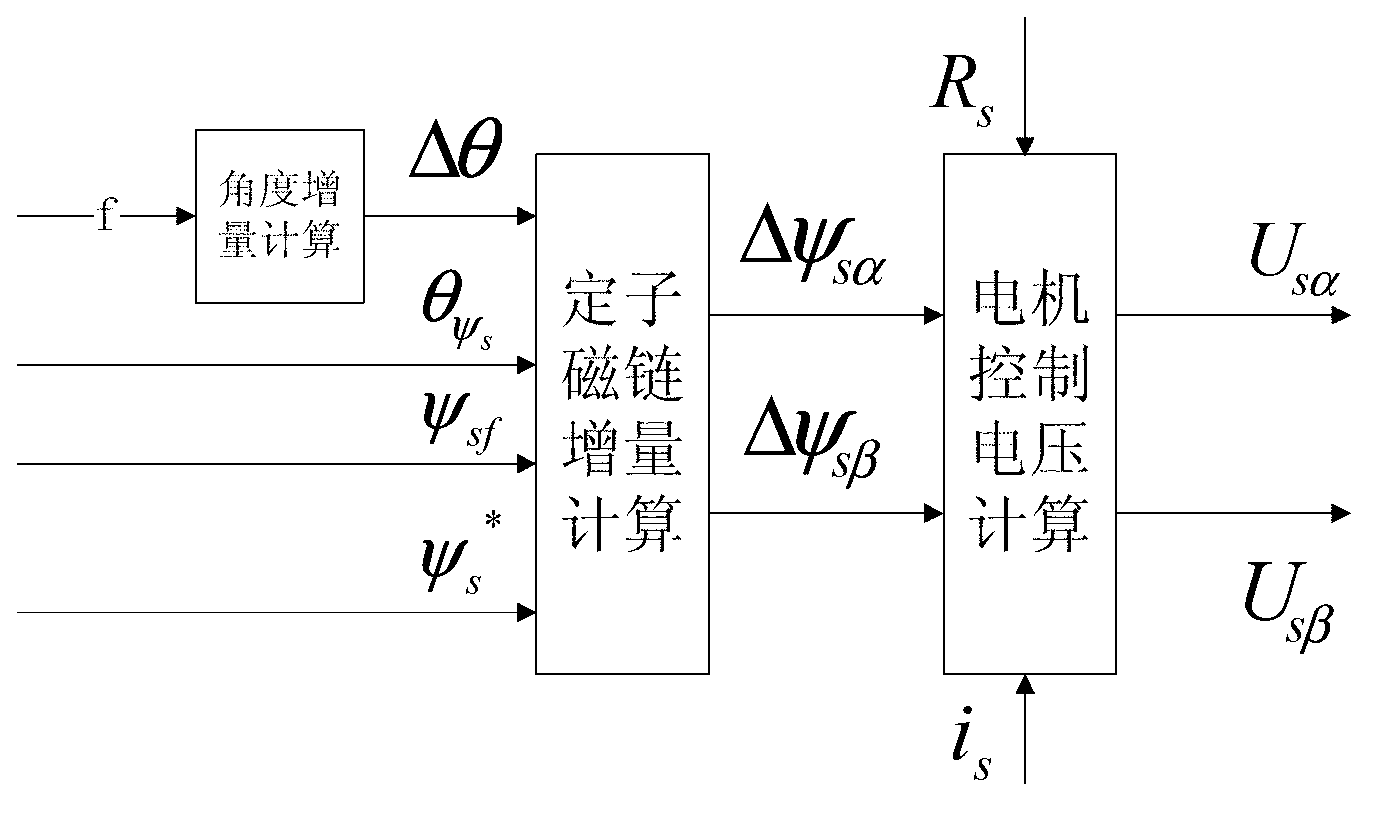
[0060] (2) According to the stator output voltage U s and the detected stator current i s Estimate stator flux linkage Estimate vector magnitude ψ sf and stator flux linkage to estimate the vector angle ;
[0061] (3) Estimation of vector angle based on stator flux linkage Estimated rotor speed estimate W rf , and estimate the vector magnitude ψ based on the stator flux linkage sf and stator current i s Estimated electromagnetic torque estimate T ef ;
[0062] (4) When switching, the estimated value of rotor speed W at the instant before switching rf Rotor feedback speed as motor closed lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More