Single rotor wing unmanned aerial vehicle three-freedom degree semi-physical simulation platform and experimental method
A technology of unmanned aerial vehicle and semi-physical simulation, which is applied in the field of simulation platform to achieve the effect of improving efficiency, high response speed, and shortening the research and development cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] A three-degree-of-freedom hardware-in-the-loop simulation platform and experimental method for a single-rotor unmanned aerial vehicle of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
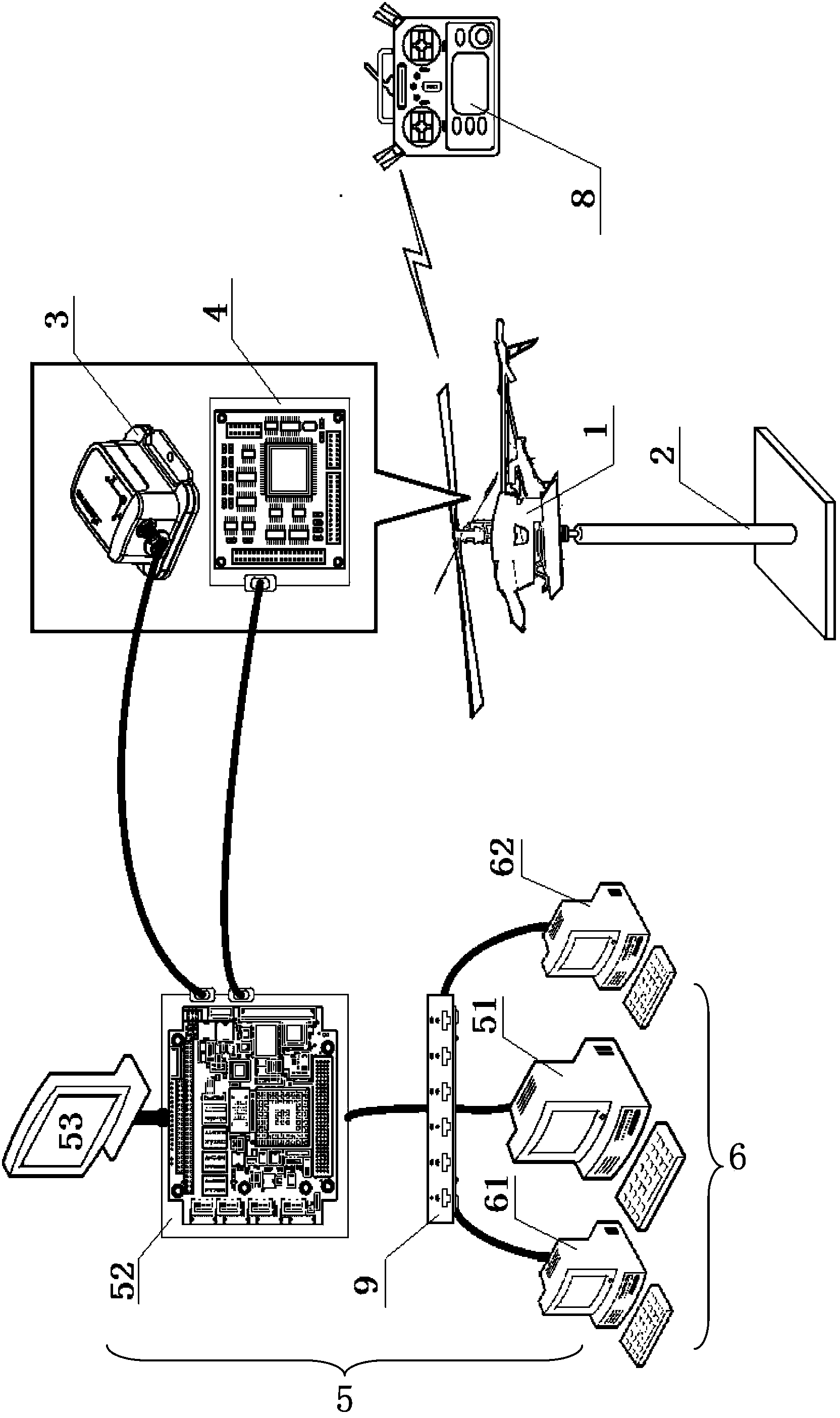
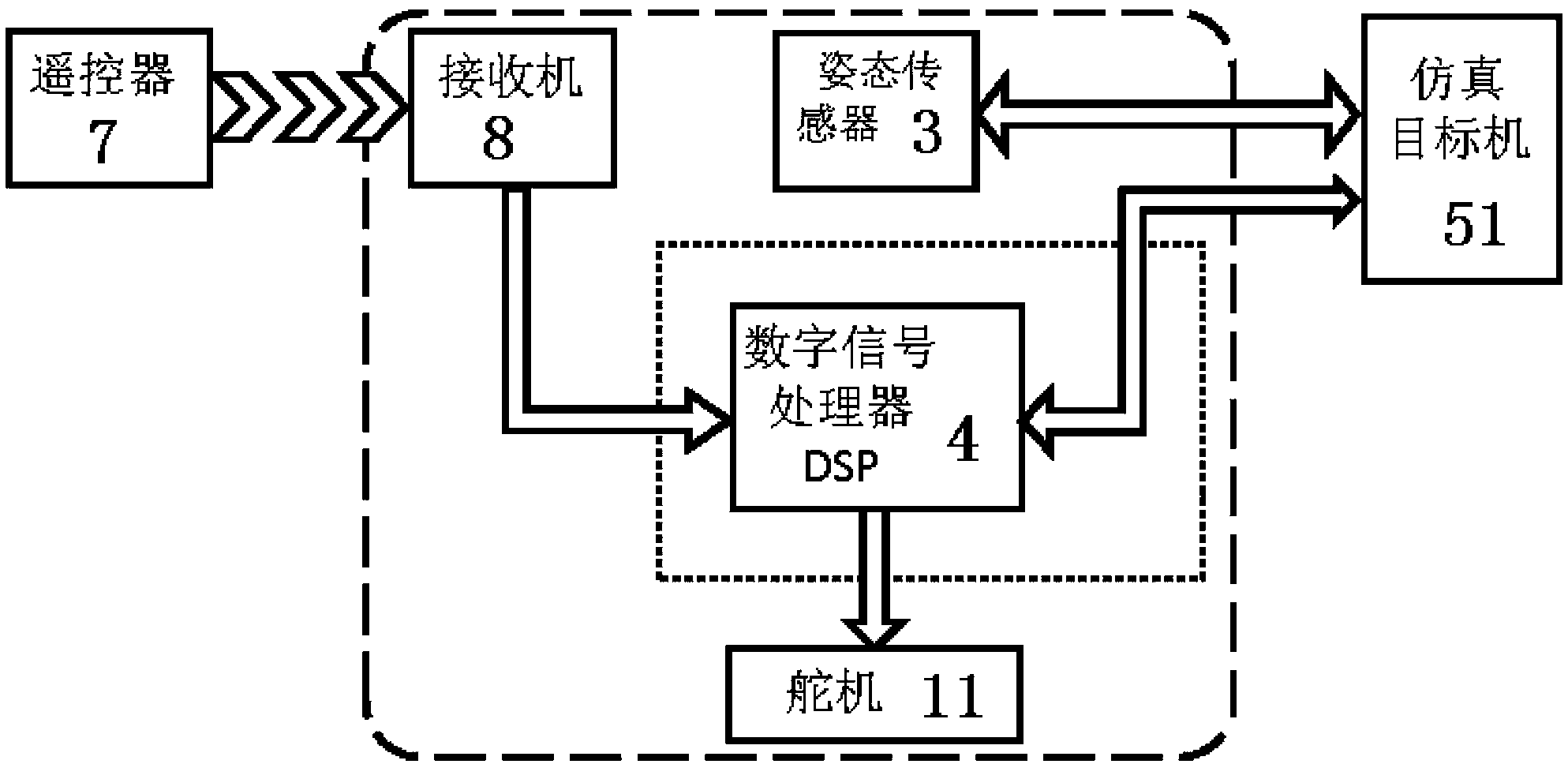
[0034] Such as figure 1 , figure 2 As shown, a three-degree-of-freedom semi-physical simulation platform for a single-rotor unmanned aerial vehicle of the present invention includes a single-rotor helicopter 1, and the single-rotor helicopter 1 is arranged on a ball with universality at the top of the three-degree-of-freedom aircraft turntable 2 On the joint, the geometric center of the single-rotor helicopter 1 is provided with an on-board attitude sensor 3, and the single-rotor helicopter 1 is provided with an on-board co-controller 4 for controlling the steering gear 11 of the single-rotor helicopter 1. The single-rotor helicopter 1 is also provided with a receiver 8 for receiving the signal of the remote contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More