

Self-adaption claw mechanism of spatial on-orbit service robot
A service robot, self-adaptive technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of large workspace, inability to achieve versatility, few grasping modes, etc., to achieve strong versatility, self-adaptive self-stable lock Die, grab effects with a large envelope range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
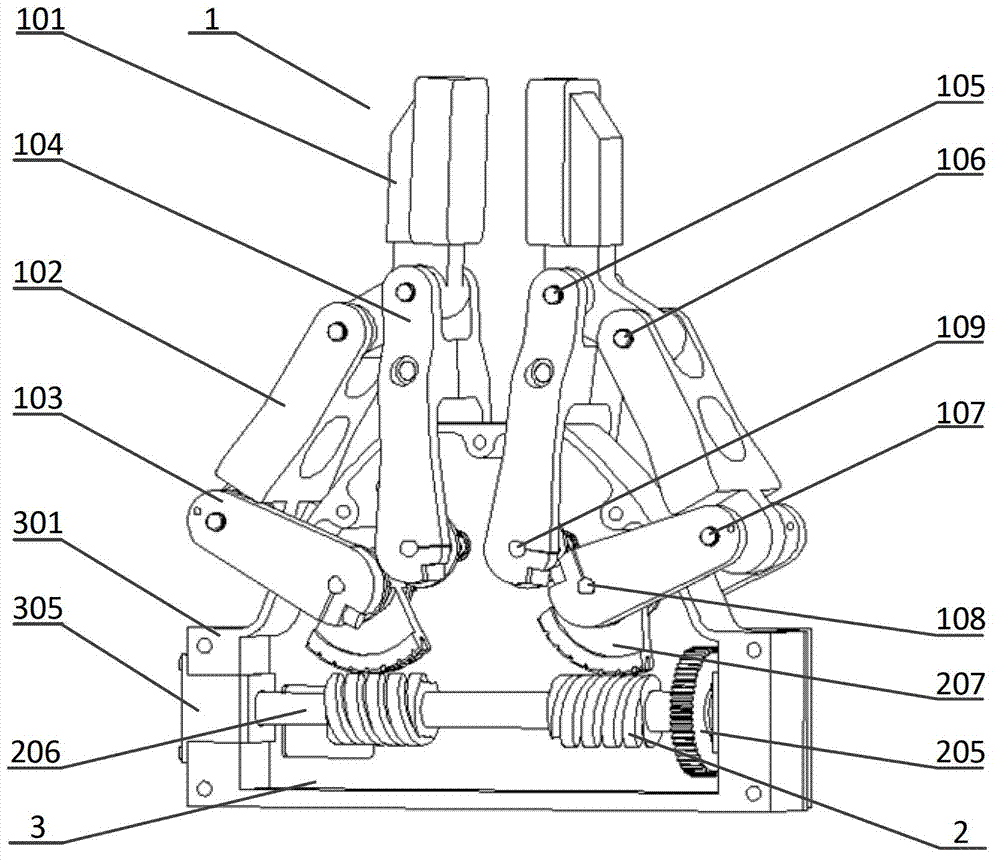
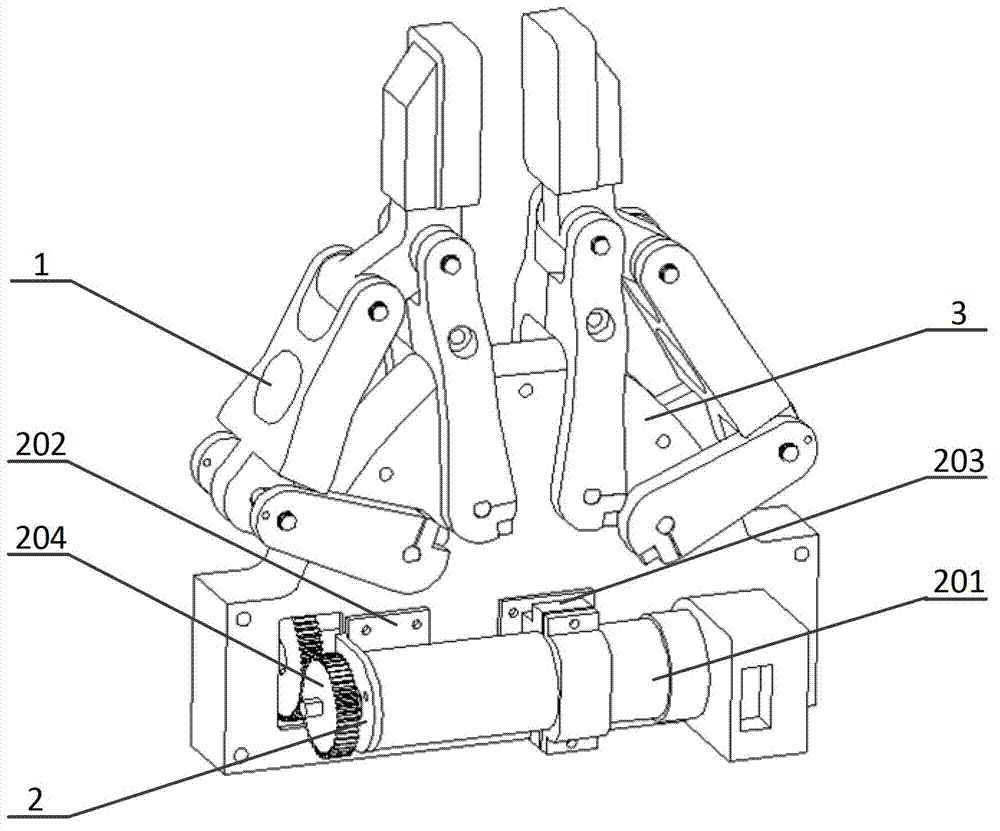
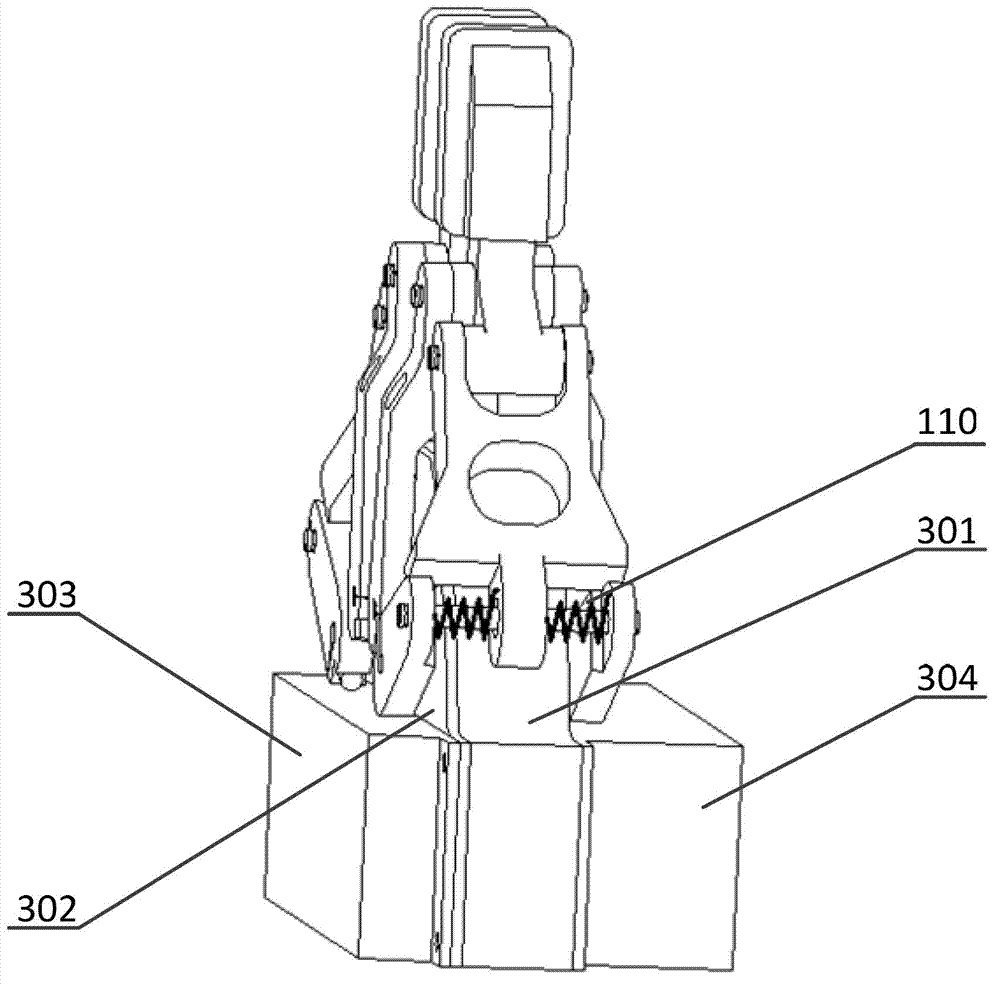
[0030] Such as Figure 1a , Figure 1b , Figure 1c As shown, it is a three-dimensional perspective view of the self-adaptive gripper mechanism of the space on-orbit service robot of the present invention, including: the self-adaptive gripper 1 , the motor and its transmission mechanism 2 , and the base part 3 .
[0031] The self-adaptive finger 1 is composed of two symmetrical and identical five-bar mechanisms. Each five-bar mechanism includes: a contact rod 101, an intermediate rod 102, an active rod 103, a driven rod 104, a driven pin 105, and an intermediate pin. 106, driving pin 107, driving shaft 108, driven shaft 109, torsion spring 110; the motor and its transmission mechanism 2 include: motor 201, L-shaped motor bracket 202, U-shaped motor bracket 203, pinion 204, large gear 205 , worm shaft 206 , worm wheel 207 ; the base part 3 includes: a palm base 301 , a palm front shell 302 , a palm front cover 303 , a palm rear cover 304 , and a worm shaft positioning base 305 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More