

Unattended chess-playing robot system
A robot system and robot technology, applied in the field of robots, can solve problems such as prone to danger, affect the audience experience, lose chess pieces, etc., and achieve the effects of increased intelligence and automation, saving human resources, and high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical scheme of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
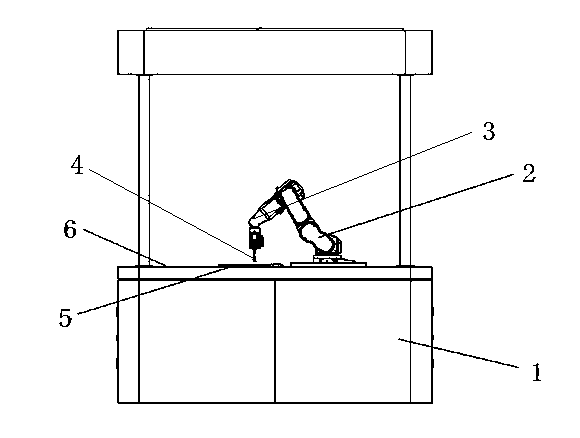
[0021] Such as figure 1 Shown, a kind of unattended chess playing robot system comprises robot workbench 1, the robot body 2 that is arranged on the robot workbench 1, is used to control the robot controller of robot body 2, is used to control the main computer of whole system , the robot controller and the host computer can be placed inside the robot workbench 1, which ensures the beauty of the whole system, so in figure 1 Not shown in the figure, the chess board 5 and the touch screen display 6 arranged on the robot workbench 1 are all electrically connected to the computer mainframe. Competitors play games with the robot on the touch screen di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More