

Glass-cleaning robot
A glass-cleaning robot and body technology, applied in vacuum cleaners, cleaning equipment, household appliances, etc., can solve the problems of easy dislocation, unusable machines, inconvenient use, etc., and achieve strong controllability, flexible movement, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
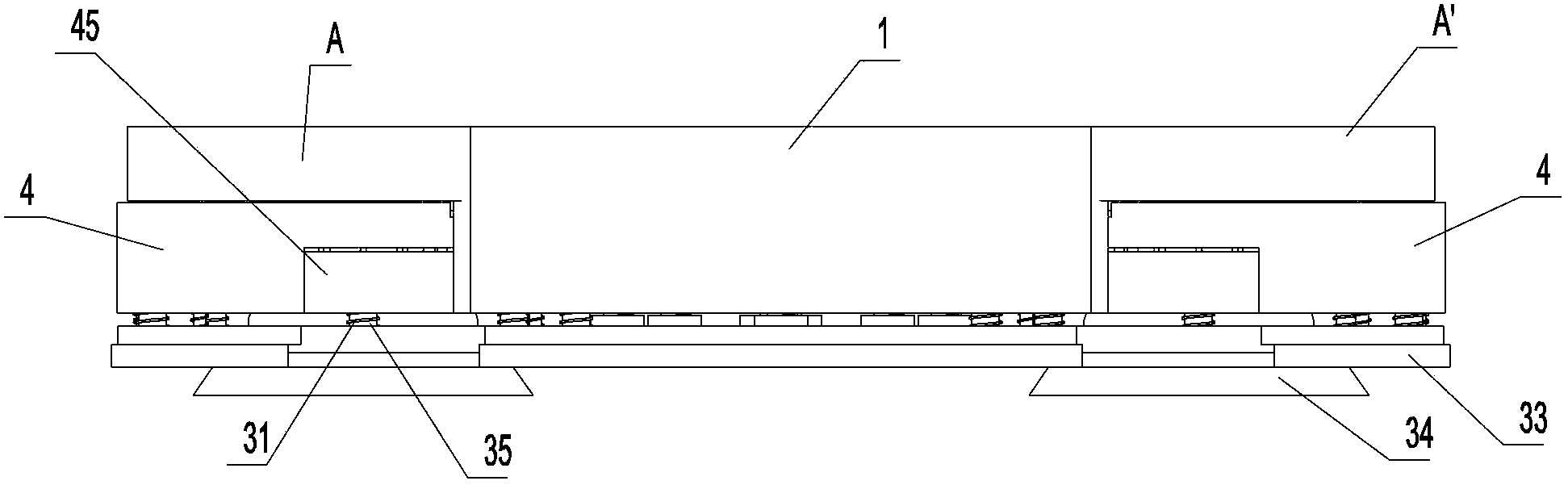
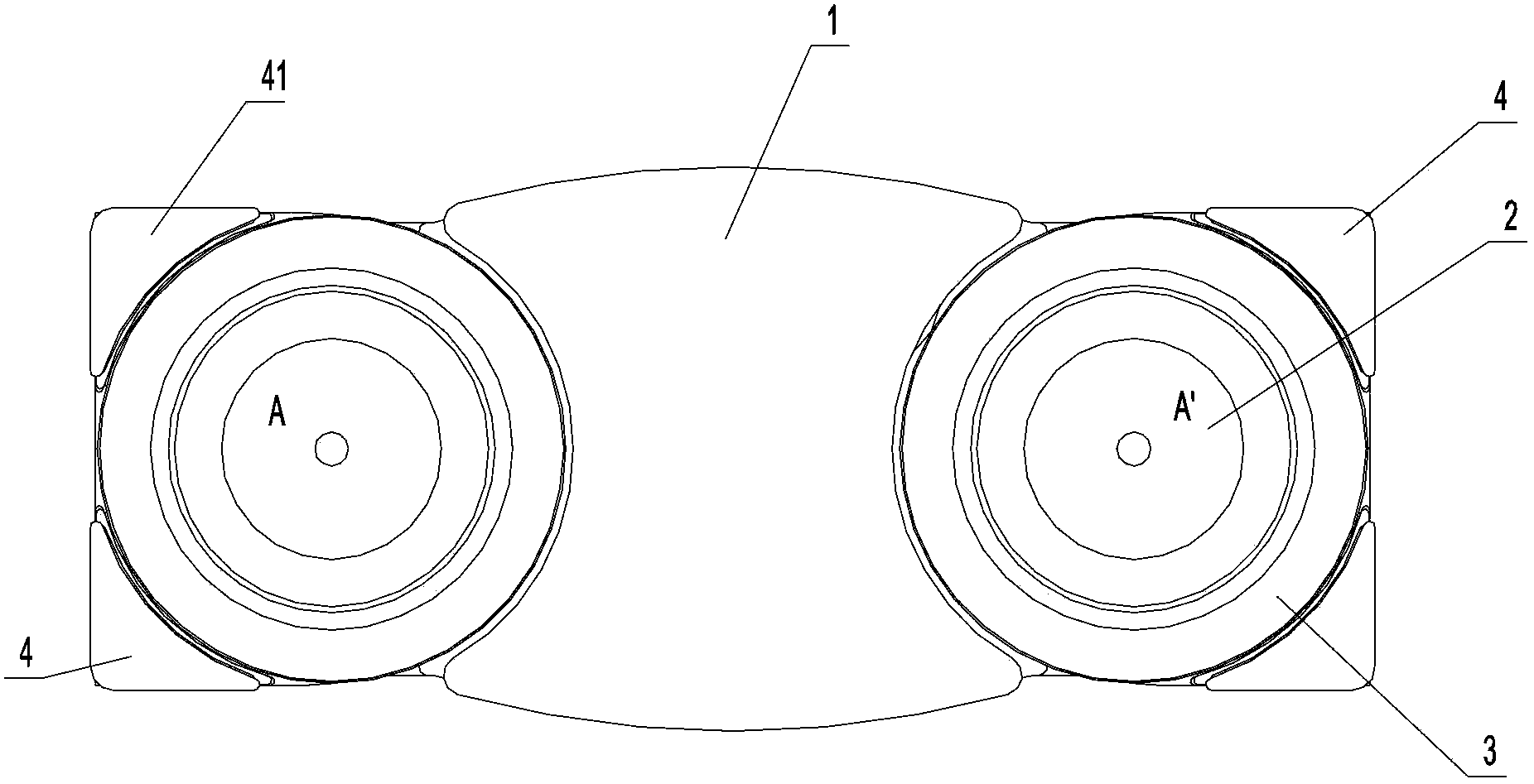
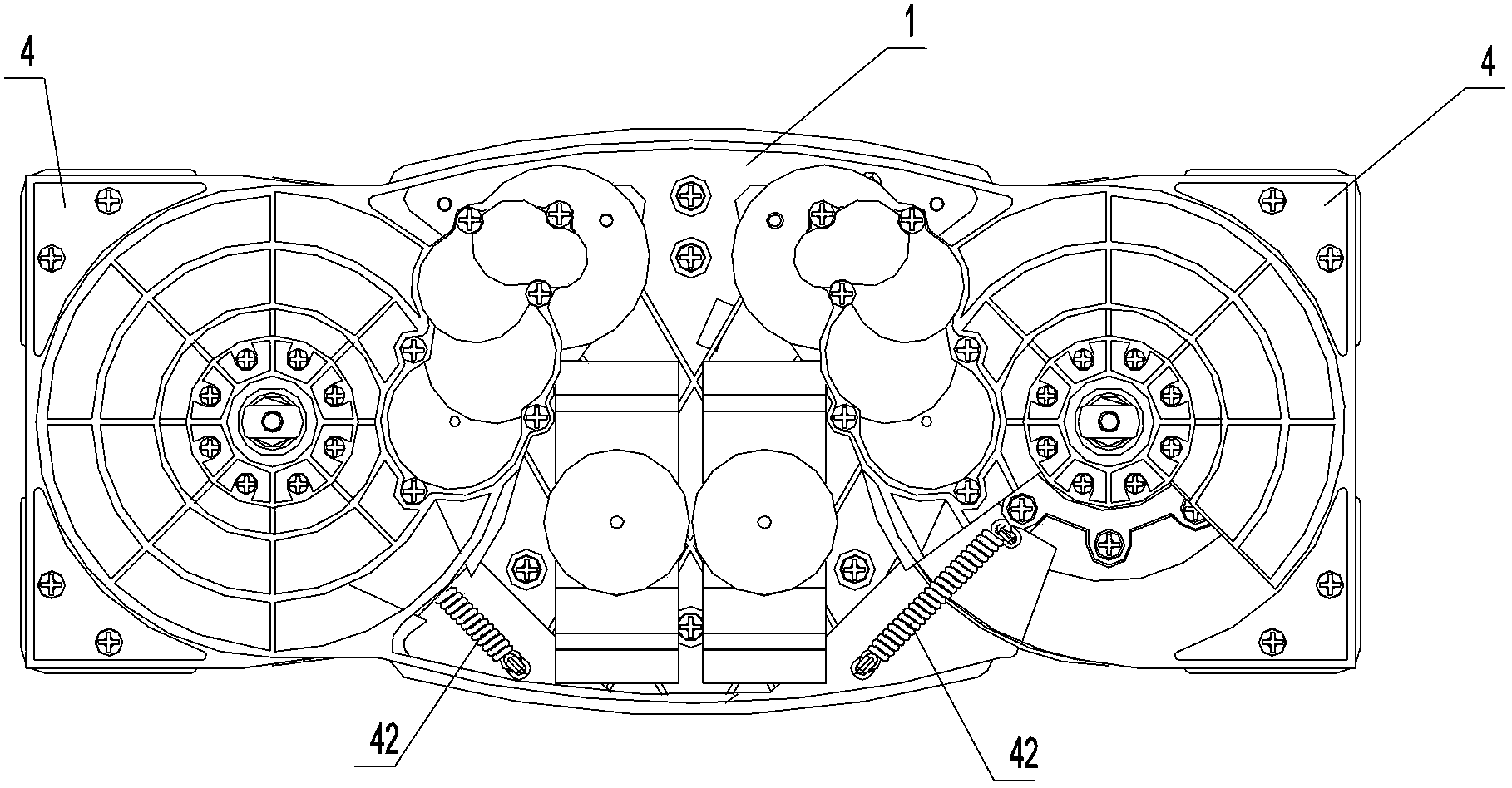
[0023] figure 1 It is a schematic diagram of the overall structure of the present invention; figure 2 for figure 1 bottom view of image 3 for figure 1 top view of Figure 4 It is a schematic diagram of the local structure of the present invention; Figure 5 for Figure 4 sectional view. combine Figure 1 to Figure 5 As shown, the present invention provides a glass-wiping robot, including a body 1 on which a control unit, a drive unit (not shown) and a first cleaning unit 2 are provided, and the glass-wiping robot also includes a rotatable A pair of adsorption turntables 3 at both ends of the bottom of the body 1, the drive unit is connected with the adsorption turntables 3 through a control unit, and the control unit controls the magnitude and direction of power output on the two adsorption turntables 3 respectively, and drives the pair of adsorption turntables 3 The adsorption turntable 3 rotates or is stationary around the vertical axis perpendicular to the glass s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More