Distributed Robot Control System Based on Fieldbus
A fieldbus and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as complexity and closed structure, and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
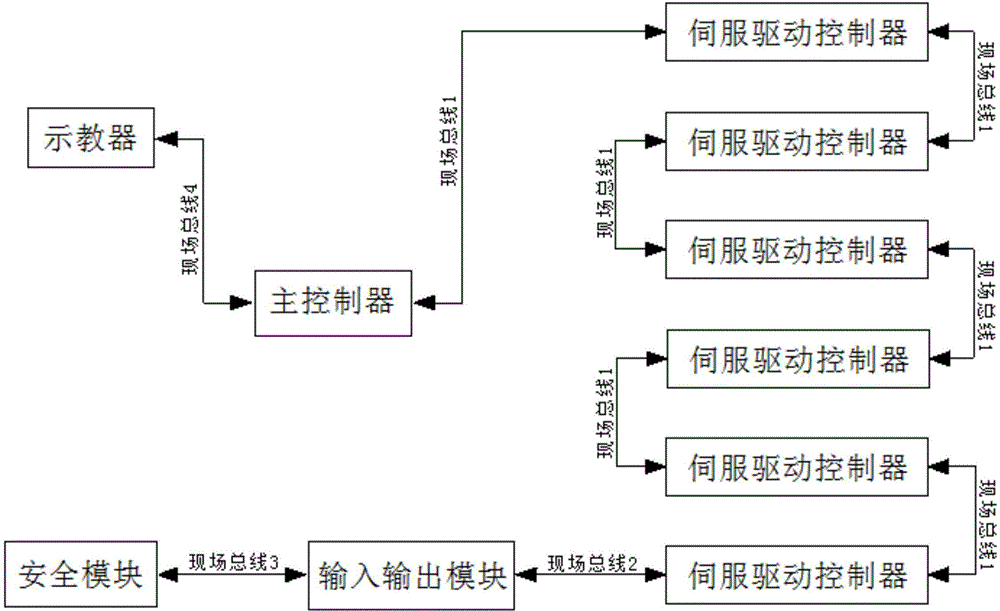
[0032] like figure 1 As shown, the robot control system includes a main controller, a servo drive controller, an input and output module, a safety module and a teaching pendant. The main control and the servo drive controller are connected through a field bus 1, and the servo drive controller and the input and output modules They are connected through field bus 2, the input and output modules and safety modules are connected through field bus 3, and the teaching pendant and the main control are connected through field bus 4.
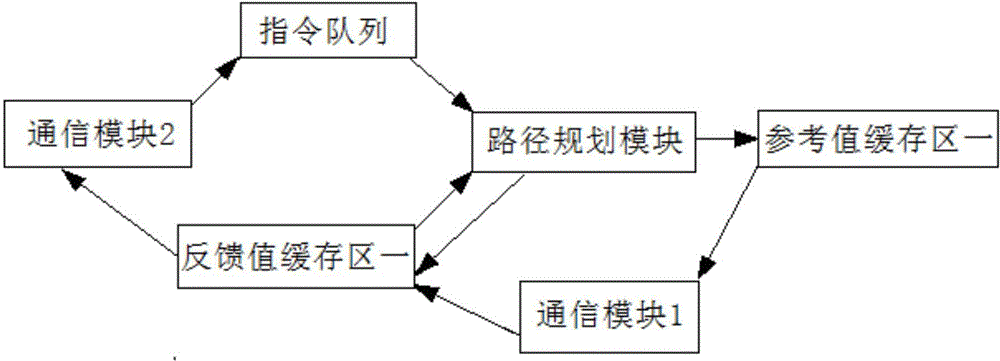
[0033] like figure 2As shown, the main controller of the control system includes a path planning module, a communication module 1, a communication module 2, an instruction queue, a reference value buffer area 1 and a feedback value buffer area 1, and the path planning module extracts instructions from the instruction queue at a specific cycle , extract the actual position, speed and torque information of the motors corresponding to each axis of the rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com