

remote transport robot arm equipped with vacuum chamber for mcf
A technology of manipulator and vacuum chamber, which is applied in the field of remote transport manipulator, can solve the problems of narrow entrance restricting large turning operation range, high control complexity and complexity, etc., so as to reduce wiring complexity, increase versatility and save use cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The embodiments of the present invention are described in detail below: this embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
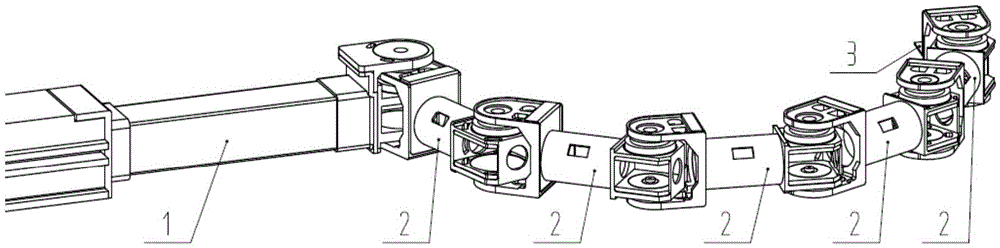
[0027] Such as figure 1 As shown, this embodiment provides a remote carrying manipulator oriented to MCF equipped with a vacuum chamber, including a torque compensation type manipulator joint 1, a plurality of space bearing component manipulator joints 2, a remote operation and maintenance manipulator support Seat 3. All the joints are connected through the EtherCAT bus, and the transmission mechanism of each space-bearing componentized manipulator joint is similar to the torque-compensated...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More