

Machine vision parallel sorting robot
A machine vision and robotics technology, applied in the field of robotics, can solve the problems of vibration of the moving platform, easy to wear, and the contact surfaces cannot always be closely fitted, etc., to achieve the effect of improving speed and accuracy, optimizing algorithms, and reducing wear and tear.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to further illustrate the technical means and functions adopted by the present invention to achieve the predetermined invention goal, the specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
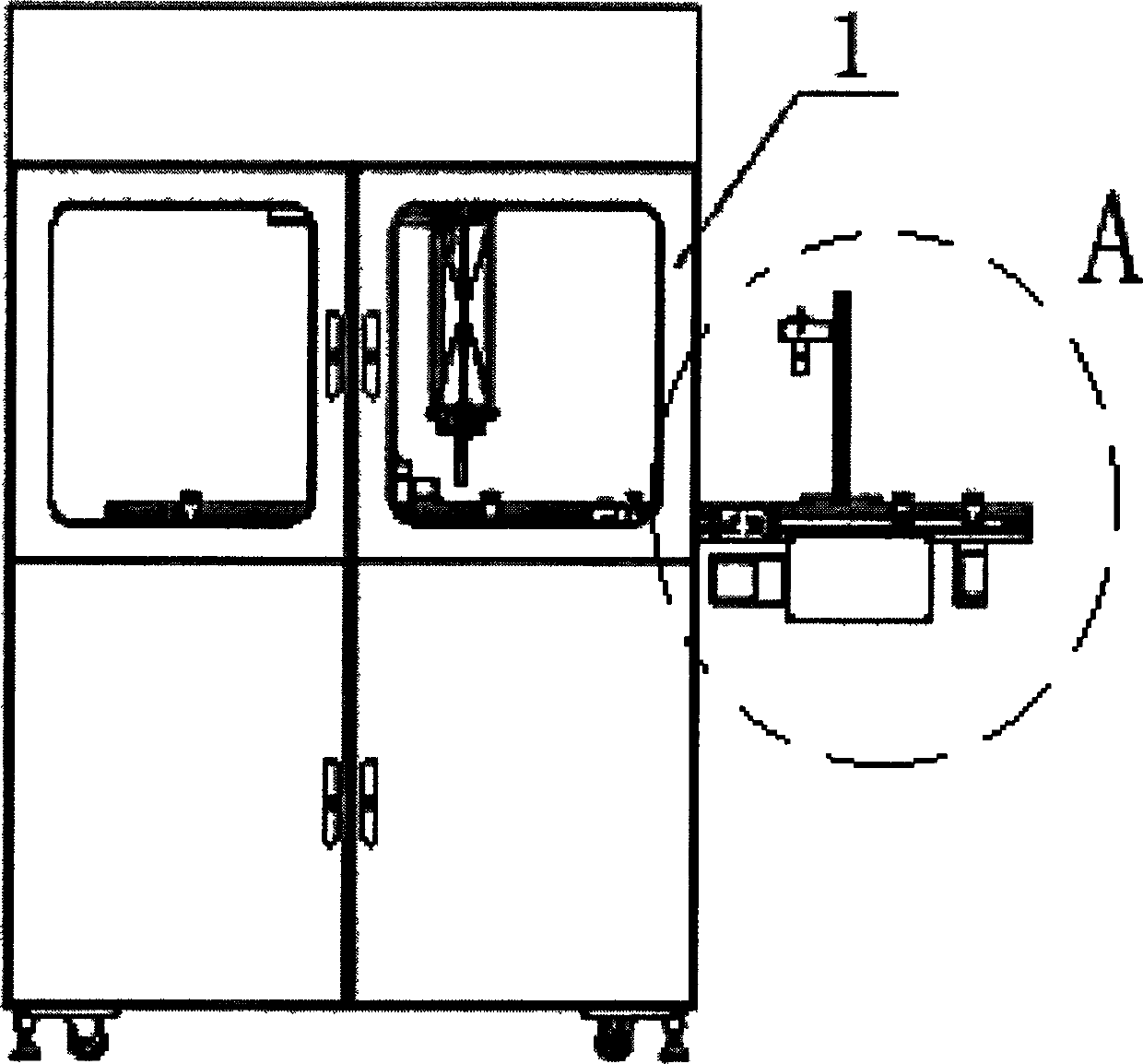
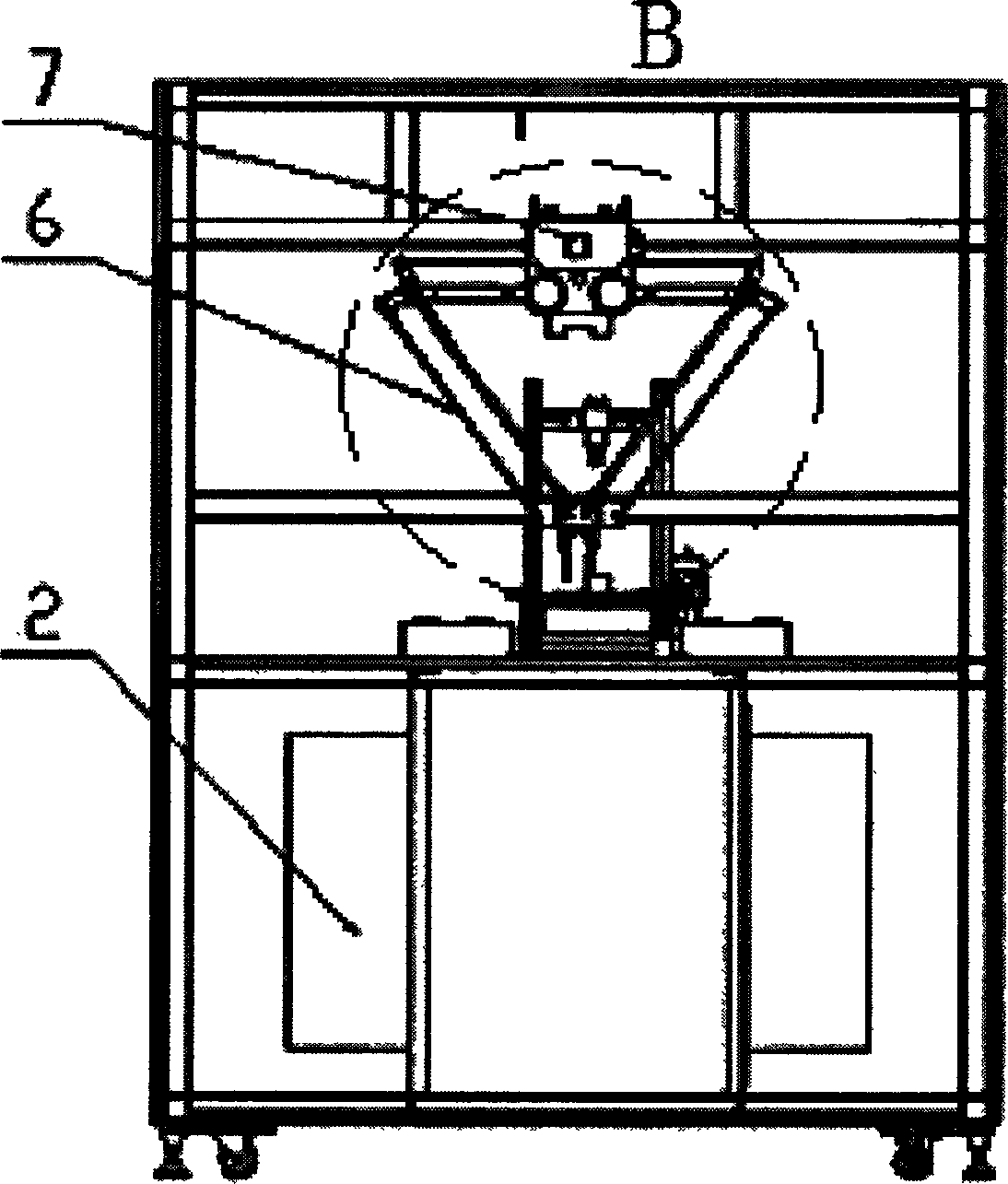
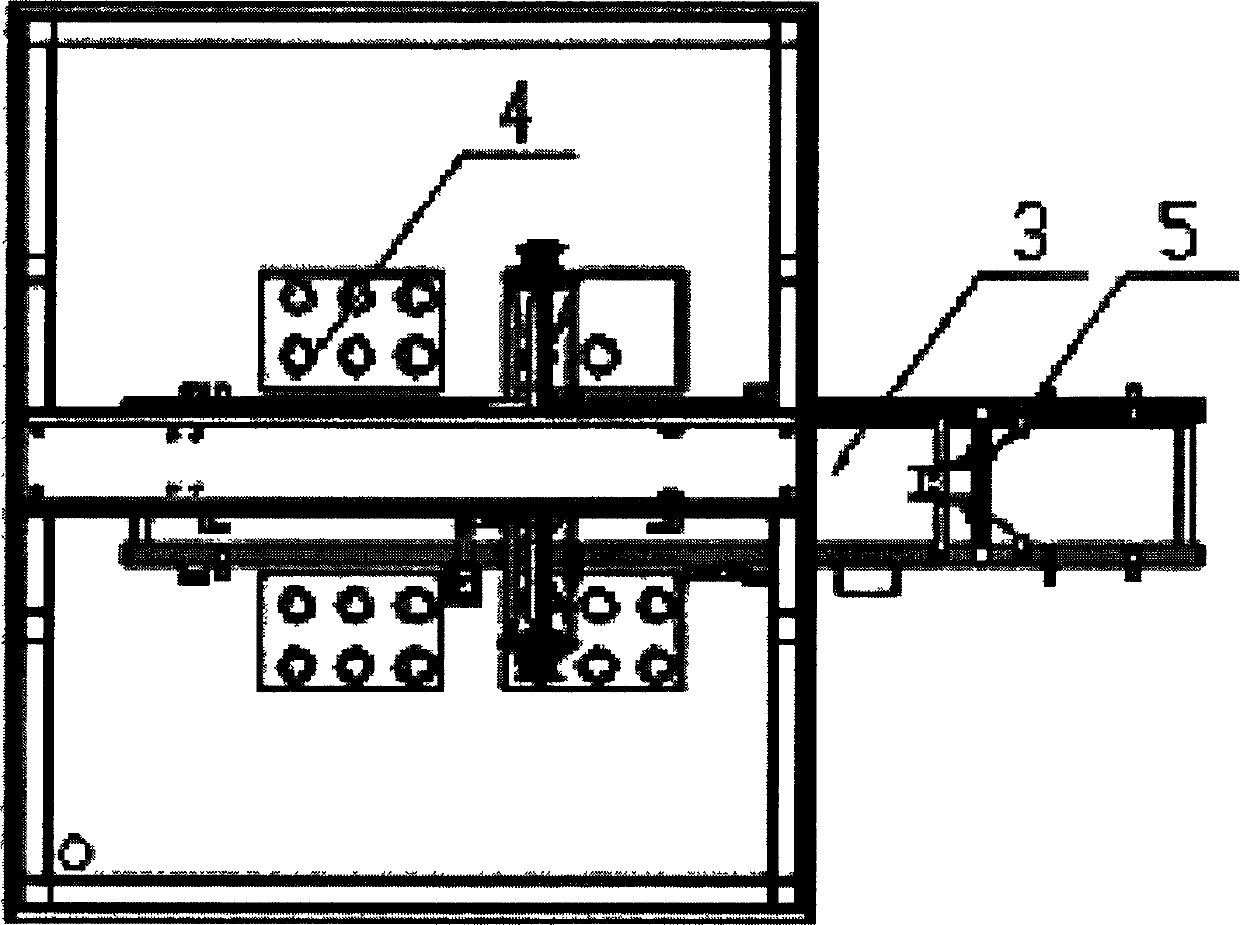
[0025] Such as Figure 1-7 The schematic diagram of the structure of the machine vision parallel sorting robot of the present invention is shown, including a box assembly 1, an electrical control system 2, a conveying line body 3, a workpiece 4 and a material box, a CCD machine vision system 5, and a DELTA type parallel sorting robot body 6 , robot translation platform 7, industrial control computer, the upper part of the box assembly 1 is the robot translation platform 7 and the DELTA type parallel sorting robot body 6, the robot translation platform 7 is driven by an AC servo motor 15, and the ball screw nut pair 17 is driven, The linear shaft 18 is supported by the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More