

Method for PID (proportion integration differentiation) optimization control with dead zone for two-wheeled self-balancing intelligent vehicle
An optimized control and self-balancing technology, applied in the field of vehicle control, can solve the problems of small effective control angle, unstable control, speed fluctuation, etc., and achieve the effect of avoiding interference, simple control algorithm and smooth operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operating procedures. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these should belong to the protection scope of the present invention.
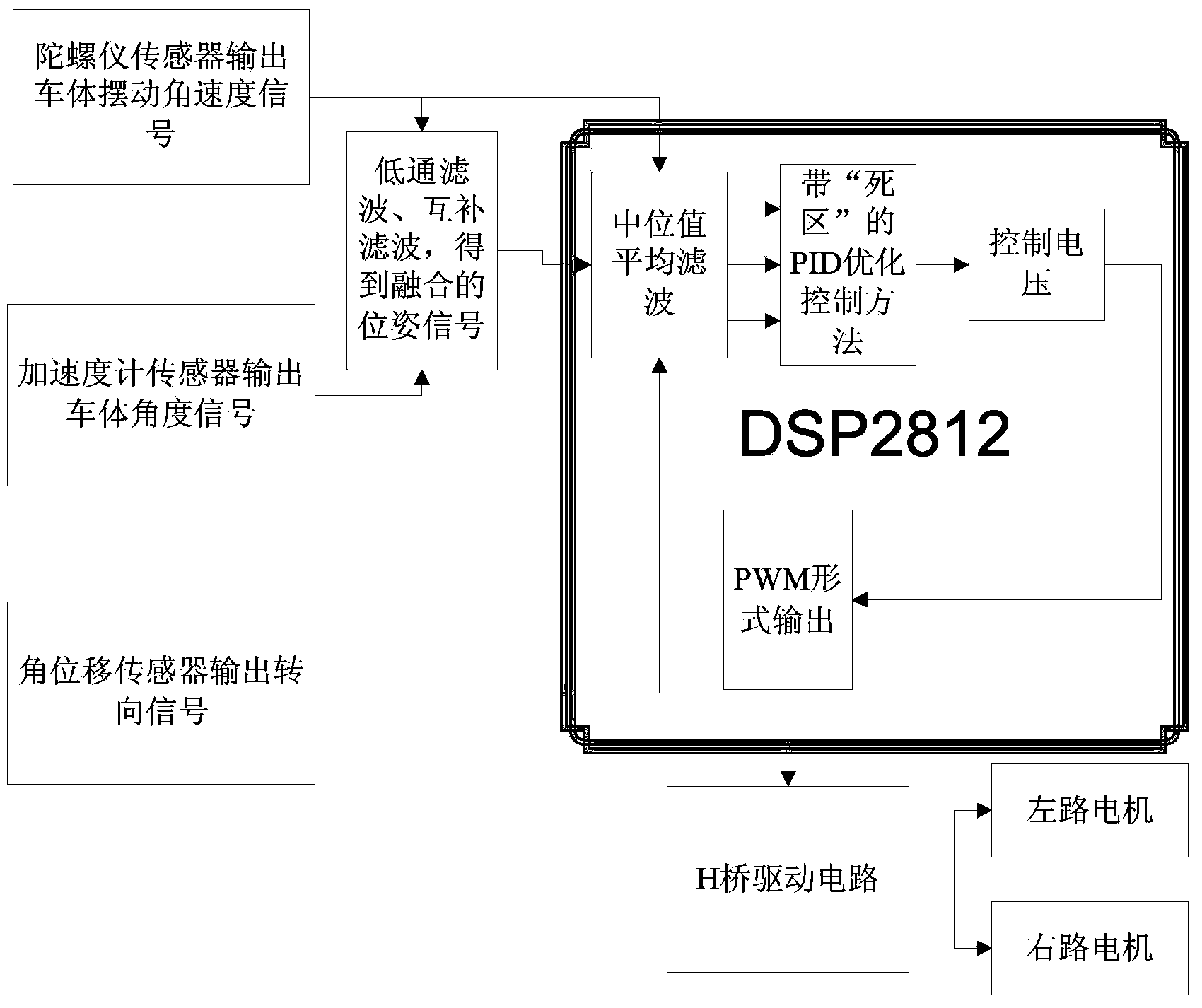
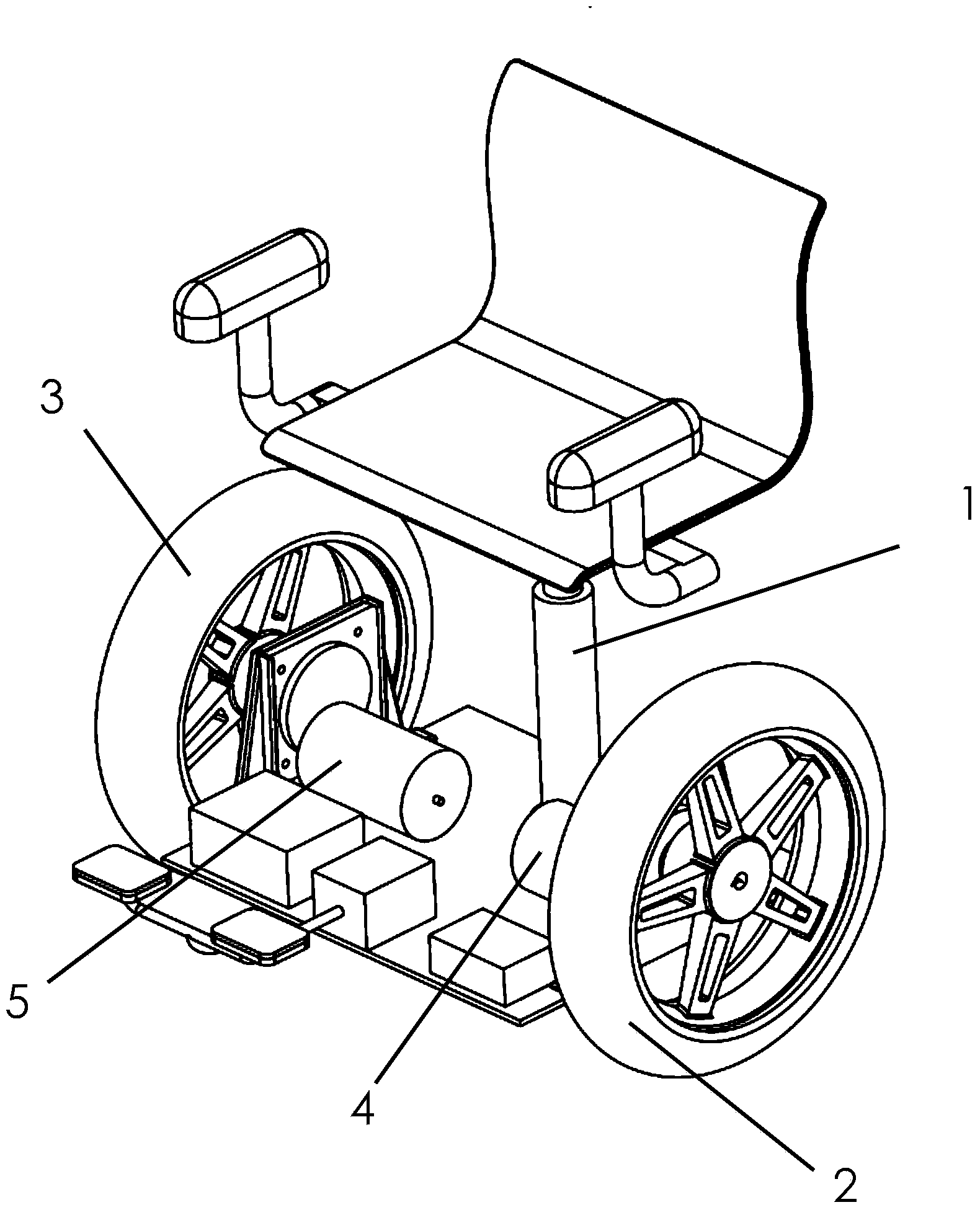
[0028] This embodiment provides a PID optimization control method with a "dead zone" for a two-wheeled self-balancing smart car. see figure 2 , the two-wheel self-balancing smart car includes a car body 1 and a left wheel 2 and a right wheel 3 installed on the car body 1; the car body 1 is provided with a gyroscope for detecting the angular velocity of the car body 1 sensor, an accelerometer sensor for detecting the inclination angle of the veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More