Six-degree-of-freedom industrial robot based on X-Y-Z rectangular coordinate joint and posture wrist
An industrial robot and Cartesian coordinate technology, applied in the field of robotics, can solve the problems of realizing the last three attitude axes, reducing the moving mass, etc., and achieve the effect of excellent controllability, compact structure and weight reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with specific embodiments. It should be pointed out that those skilled in the art can make some modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
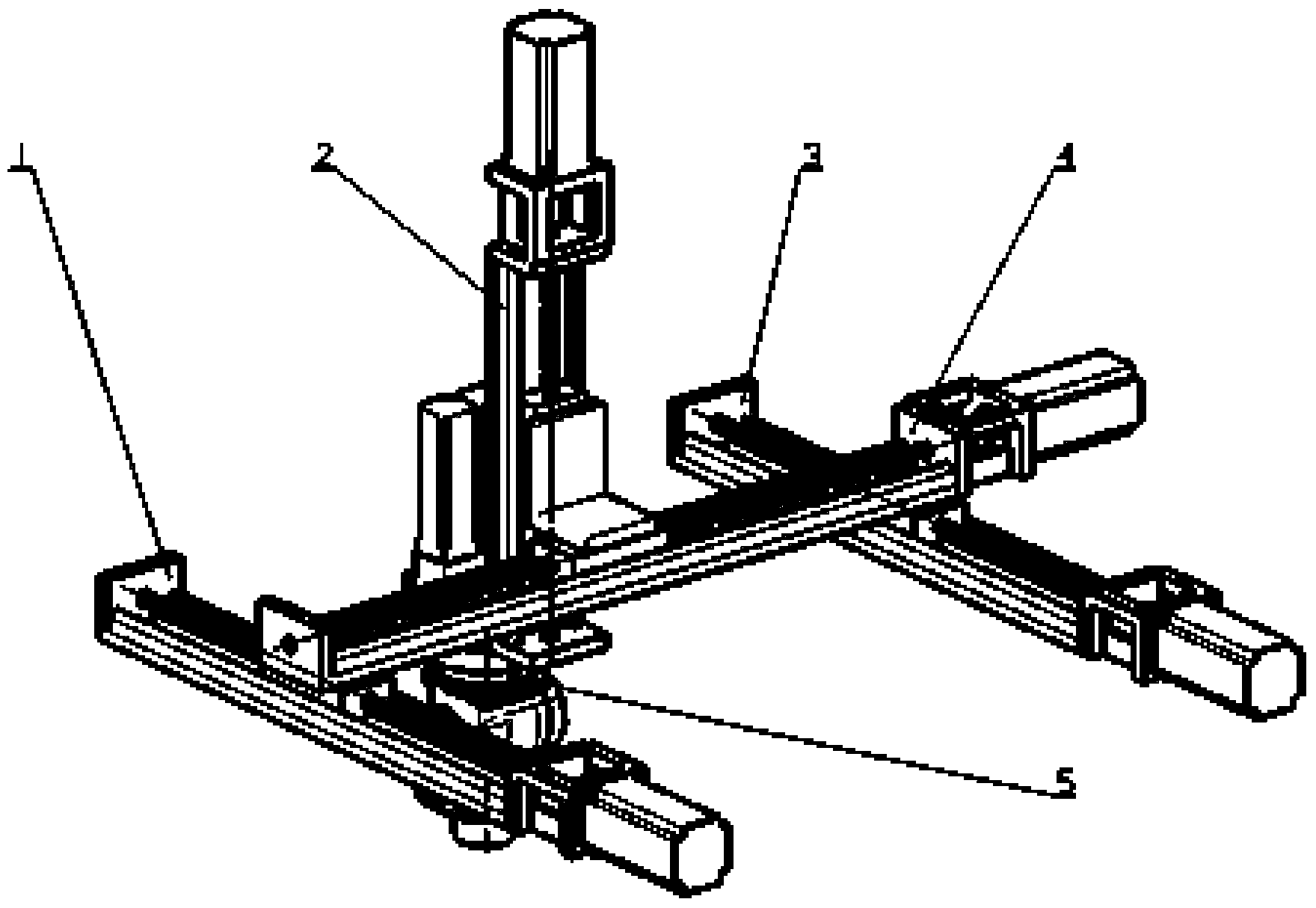
[0024] Such as figure 1 As shown, the 6-DOF industrial robot based on XYZ rectangular coordinate joints and attitude wrist includes: Cartesian coordinate joints and attitude wrist 5 .
[0025] The rectangular coordinate joint is constructed by linear modules, which realize the freedom of movement of the robot in three directions. The rectangular coordinate joint includes a first linear module 1, a second linear module 2, and a third linear module with the same structure. Linear module 3 and fourth linear module 4. Each linear module is composed of a motor, a linear guide rail, a ball screw and a slider; the motor drives the ball screw to rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com