

Cooperative control method for unmanned aerial vehicle power line routing inspection
A power line and collaborative control technology, applied in the direction of overhead lines/cable equipment, etc., can solve the problems of lack of overall system design, synchronization, complex working mode, lack of connection, etc., and achieve the effect of improving inspection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to further illustrate the technical means adopted by the present invention and the achieved effects, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and preferred embodiments.
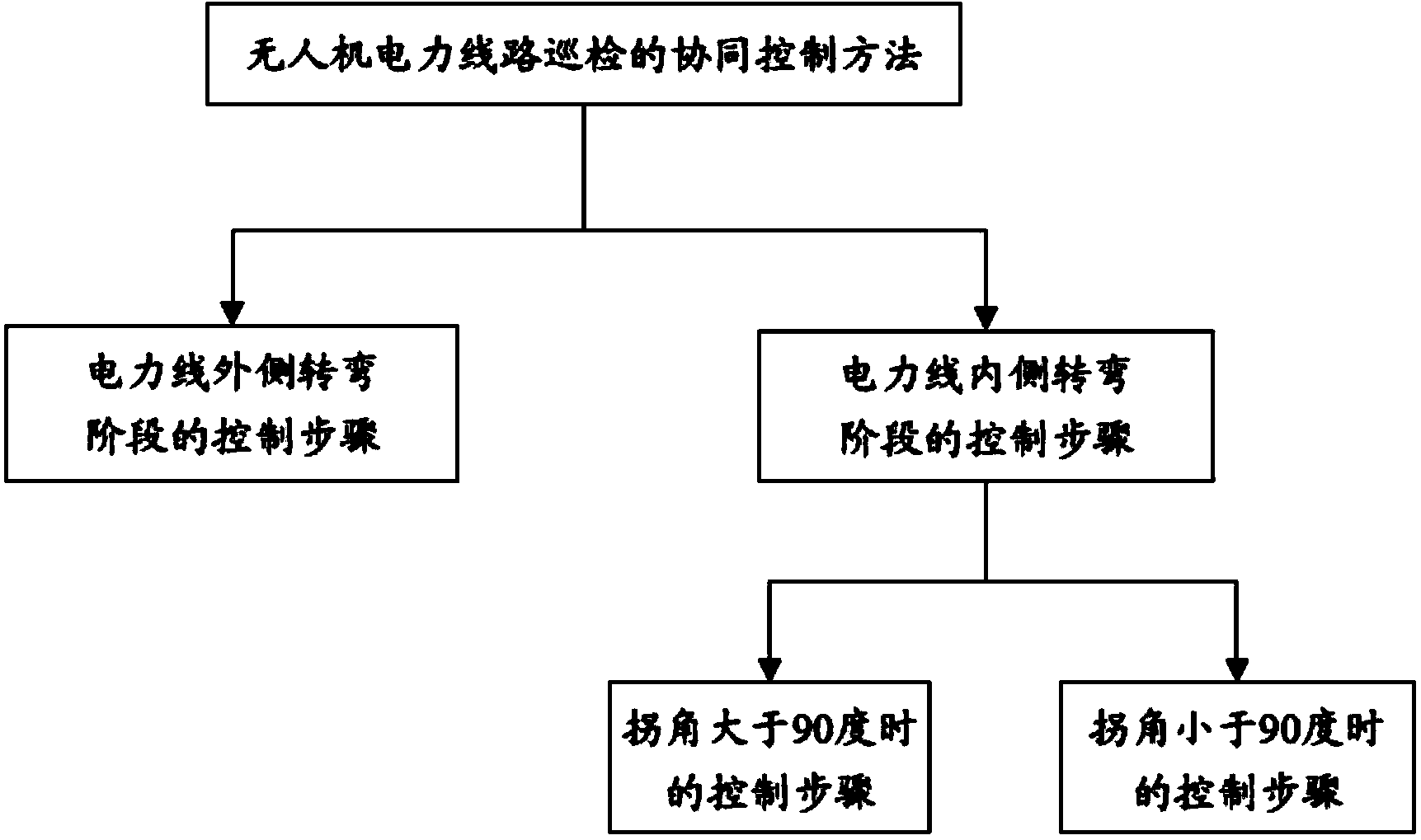
[0038] see figure 1 , is a schematic flow chart of the cooperative control method of the UAV power line inspection of the present invention.
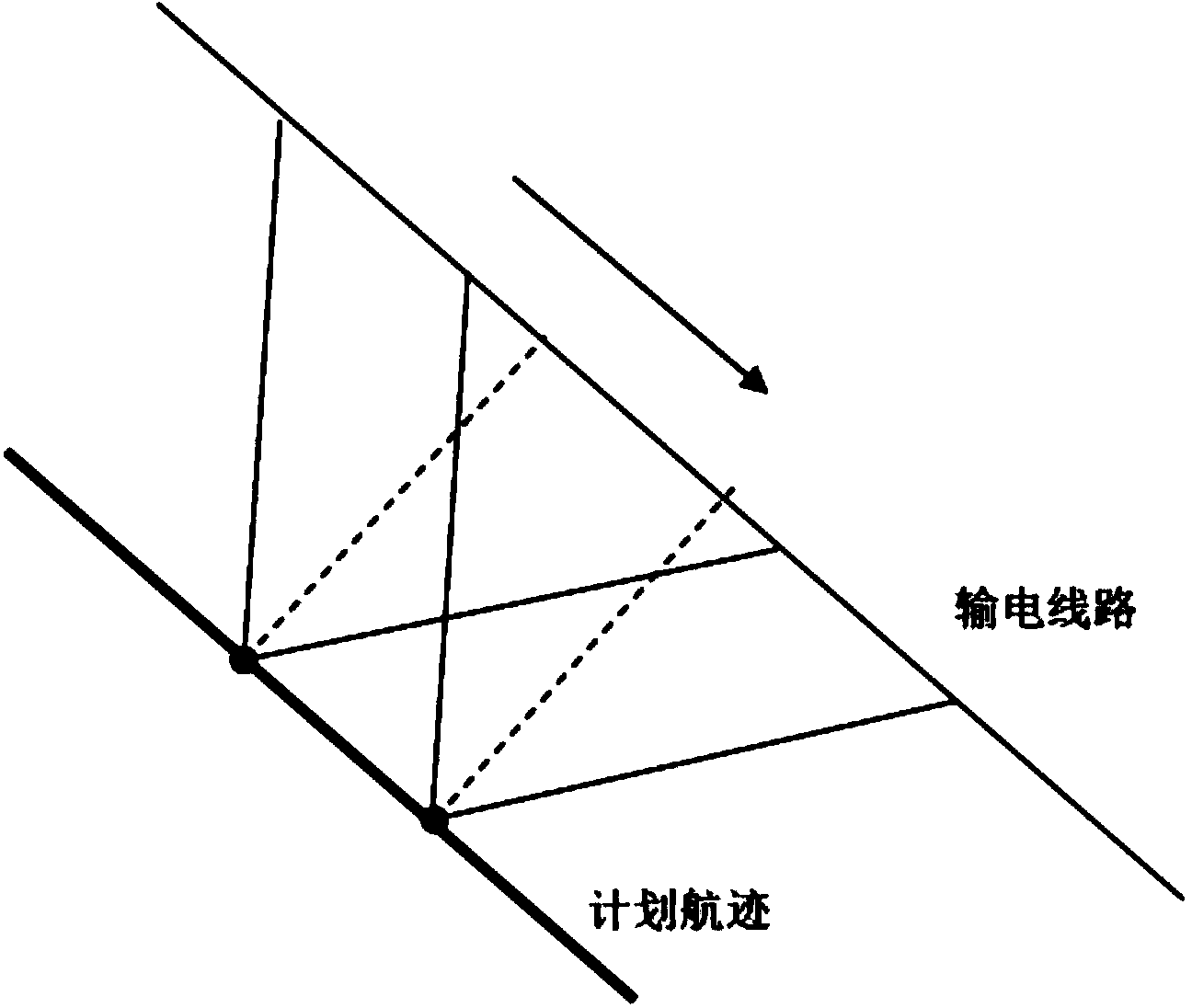
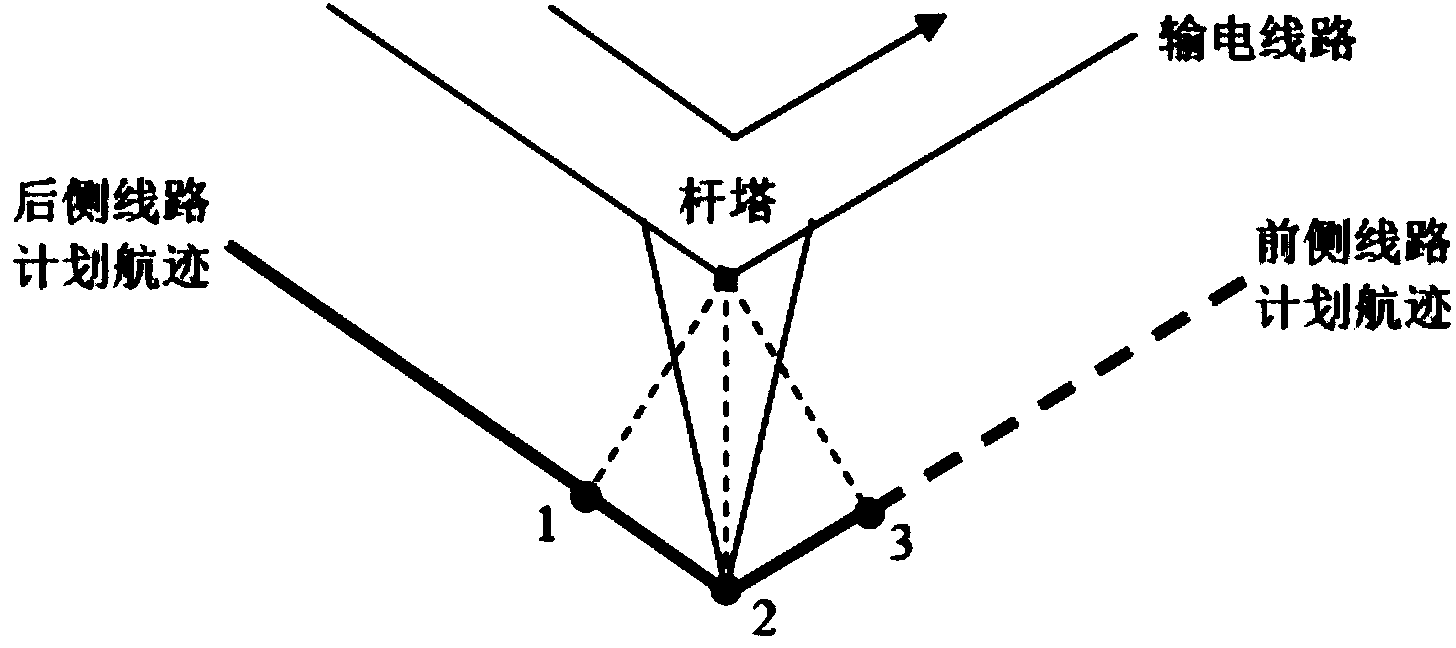
[0039] The cooperative control method of the UAV power line inspection of the present invention includes the control steps of the power line outer turning stage and the power line inner turning stage in the UAV power line inspection;
[0040] Wherein, the control steps of the outer turning stage of the power line include:
[0041] When the UAV flies to the preset hovering position, the tower is photographed sequentially through the short-focus camera and the long-focus camera;
[0042] After shooting the tower, start the locking mode of the UAV stabili...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More