Six freedom degree force feedback hand controller
A degree of freedom, force sensor technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high cost and difficulty in completing operation tasks, and achieve the effect of large output force, good dynamic response, and increased range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
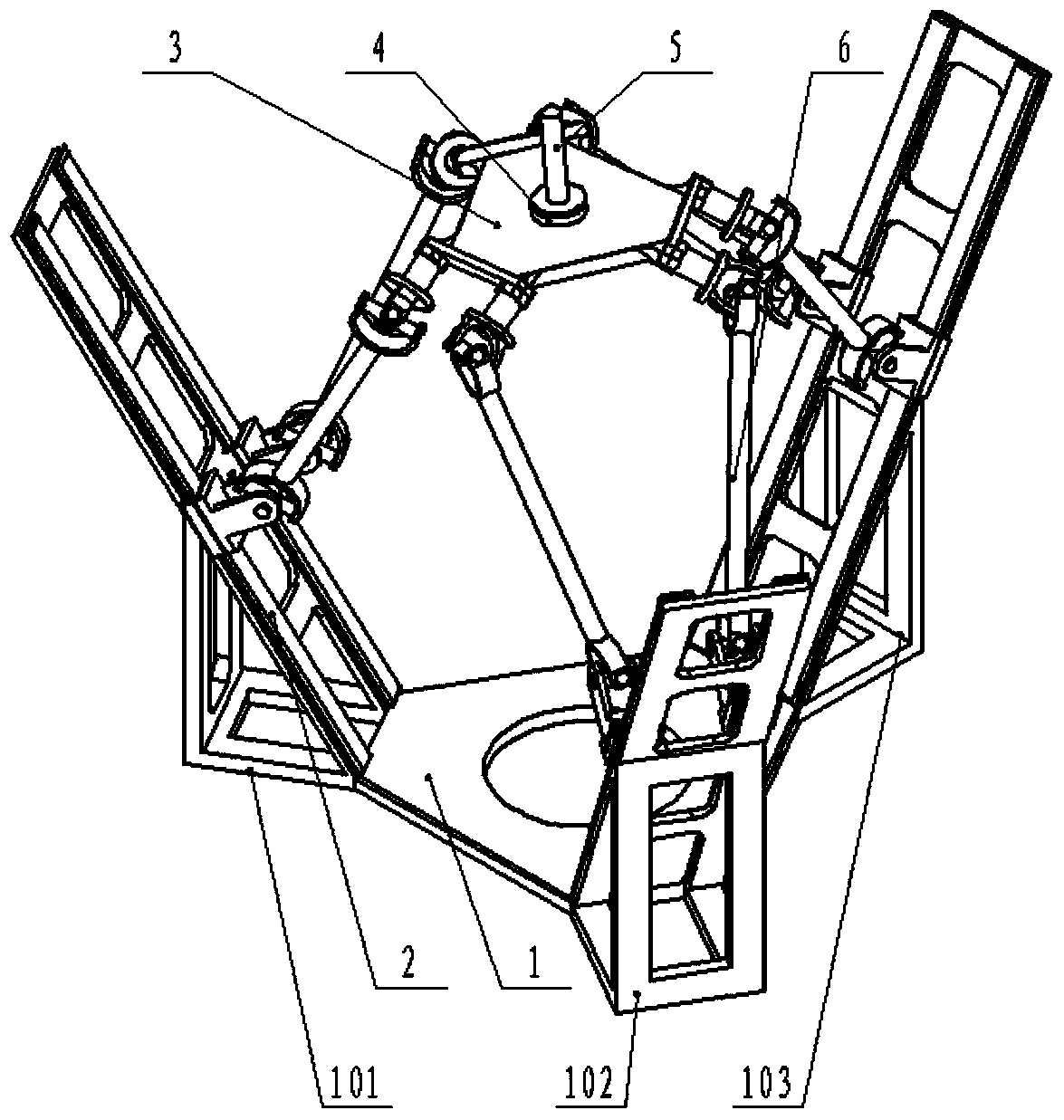
[0018] The six-degree-of-freedom force feedback hand controller can perform three-degree-of-freedom translation and three-degree-of-freedom rotational motion in space, and collect position and angle information to track the pose of the end effector; when it is necessary to simulate feedback force, It is necessary for the driving element to output a certain feedback force to realize the reproduction of virtual force.
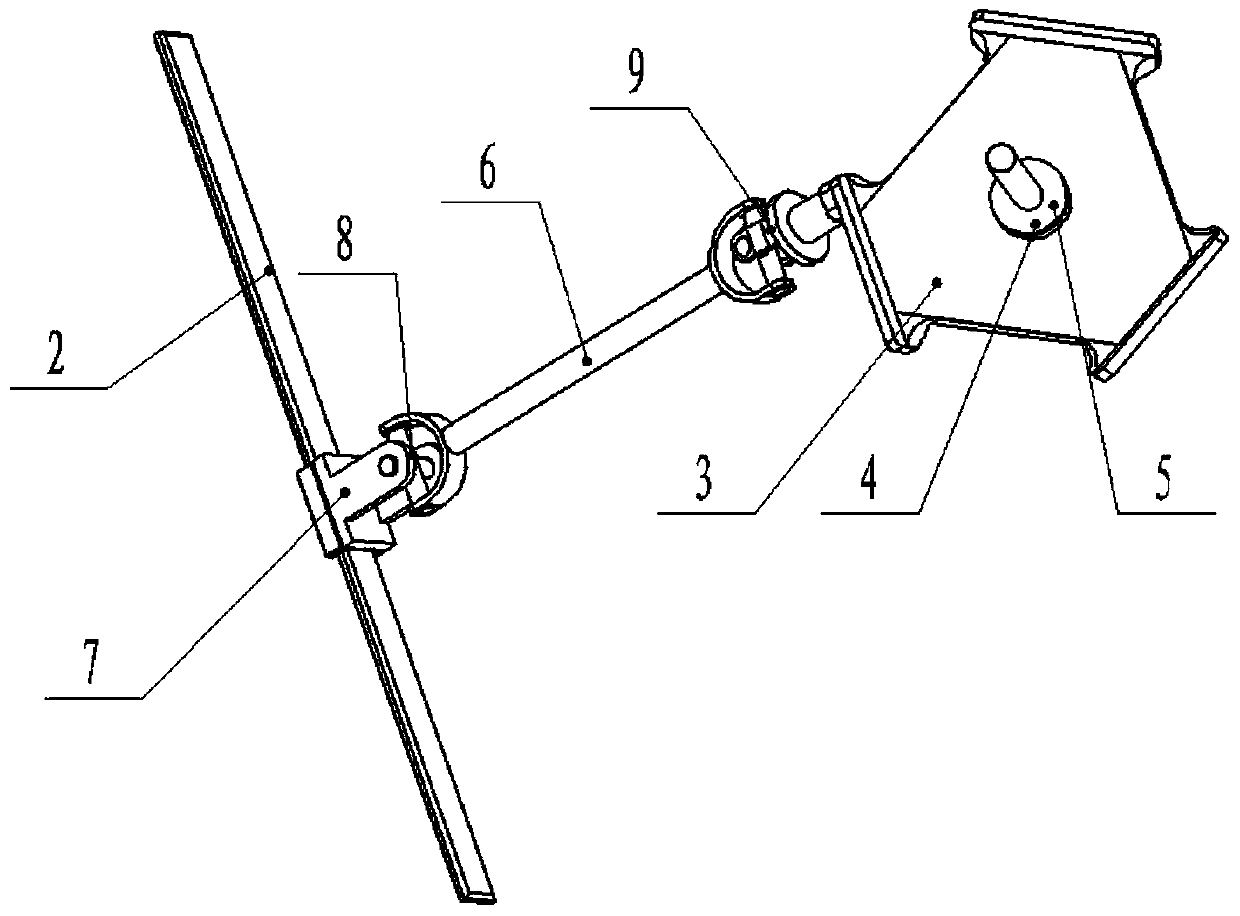
[0019] The six-degree-of-freedom force feedback hand controller is mainly composed of a fixed base (1), a linear motor part (2), a movable platform (3), a force sensor (4), an operating handle (5), a connecting rod (6), and a slider (7), universal joint (8), ball hinge (9);
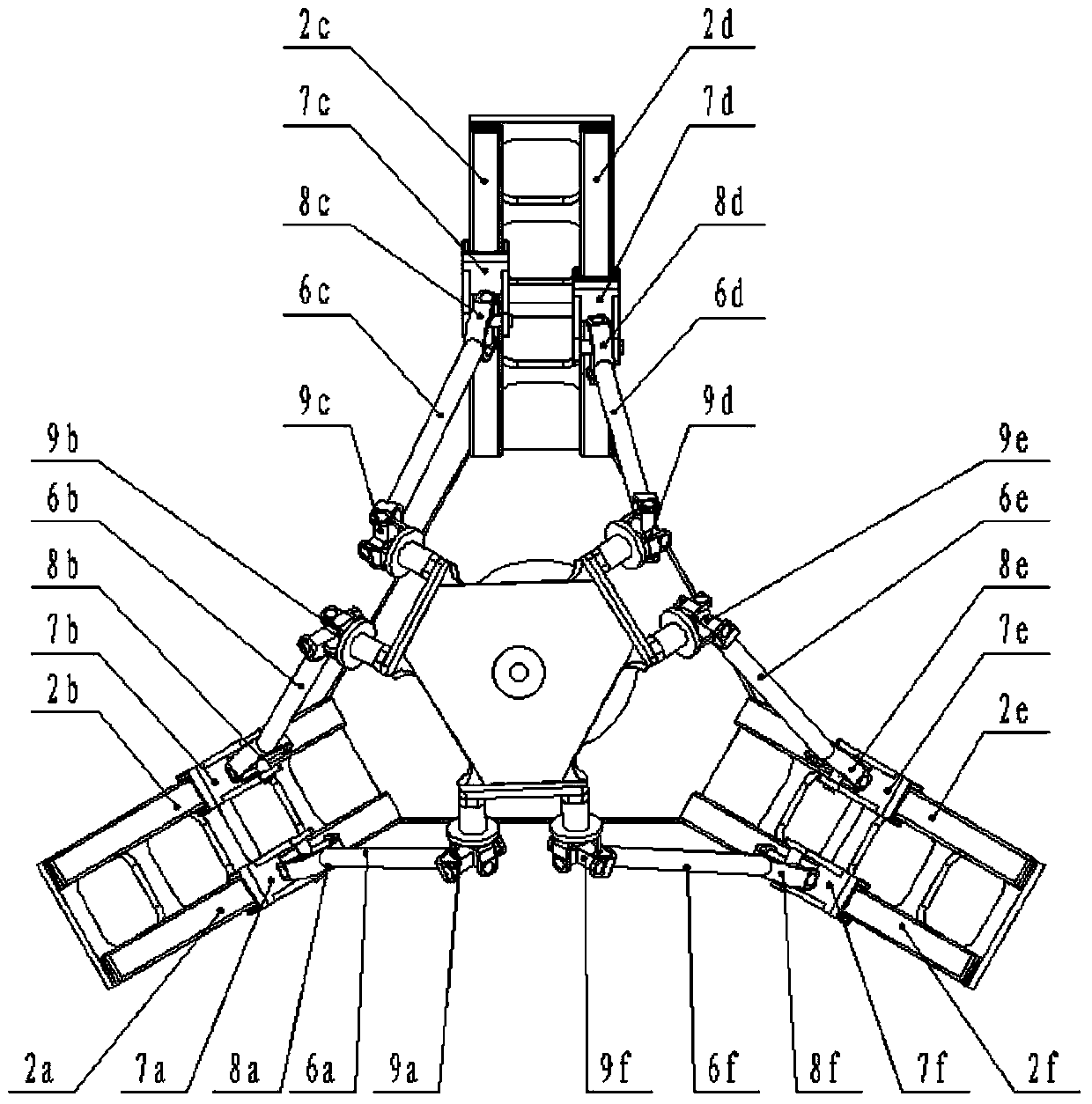
[0020] Among them, such as figure 2 As shown, the branch chain part includes: linear motor (2a), linear motor (2b), linear motor (2c), linear motor (2d), linear motor (2e), linear...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap