

Method for detecting initial position of rotor of power robot
A technology of rotor initial position and detection method, which is applied in the direction of control of generators, motor generator control, control of electromechanical brakes, etc., can solve problems such as line danger, damage to power lines and robots, and impossibility of implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings.
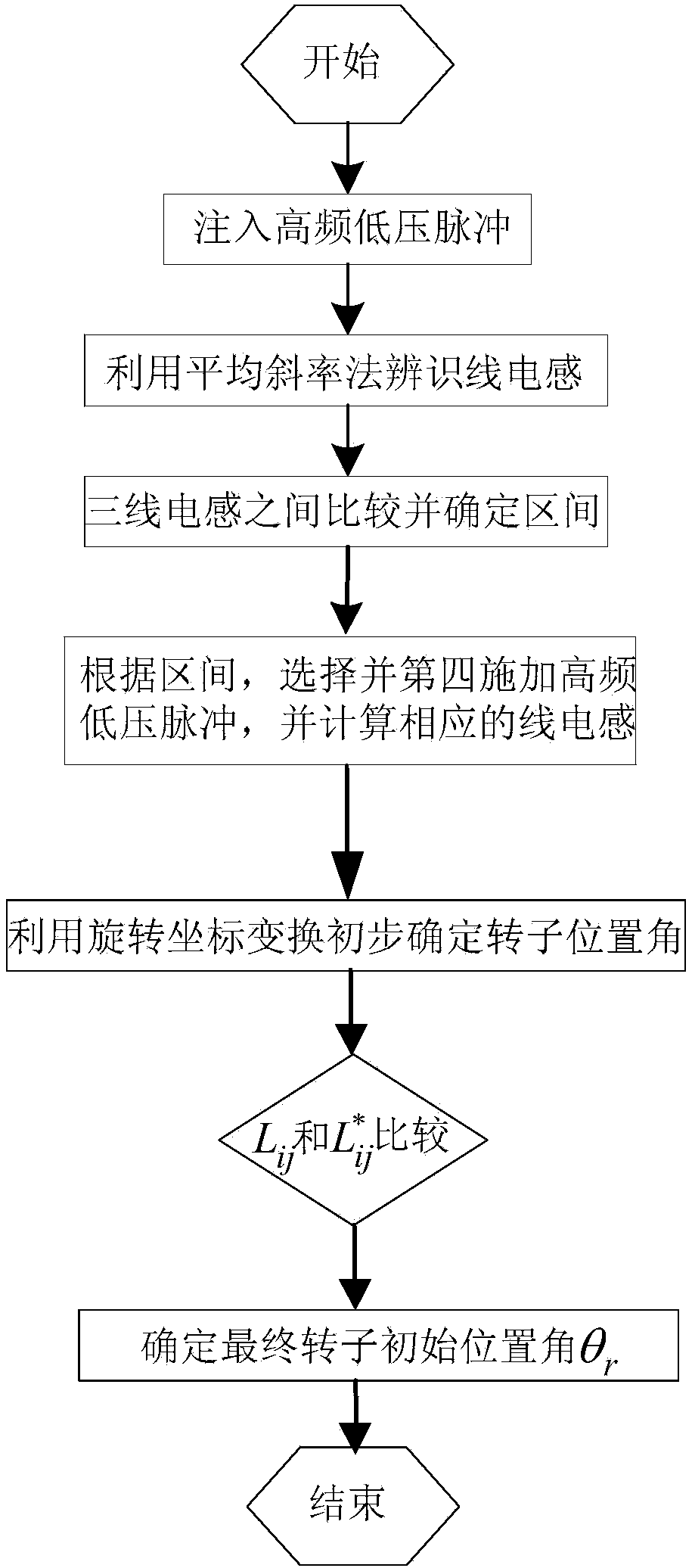
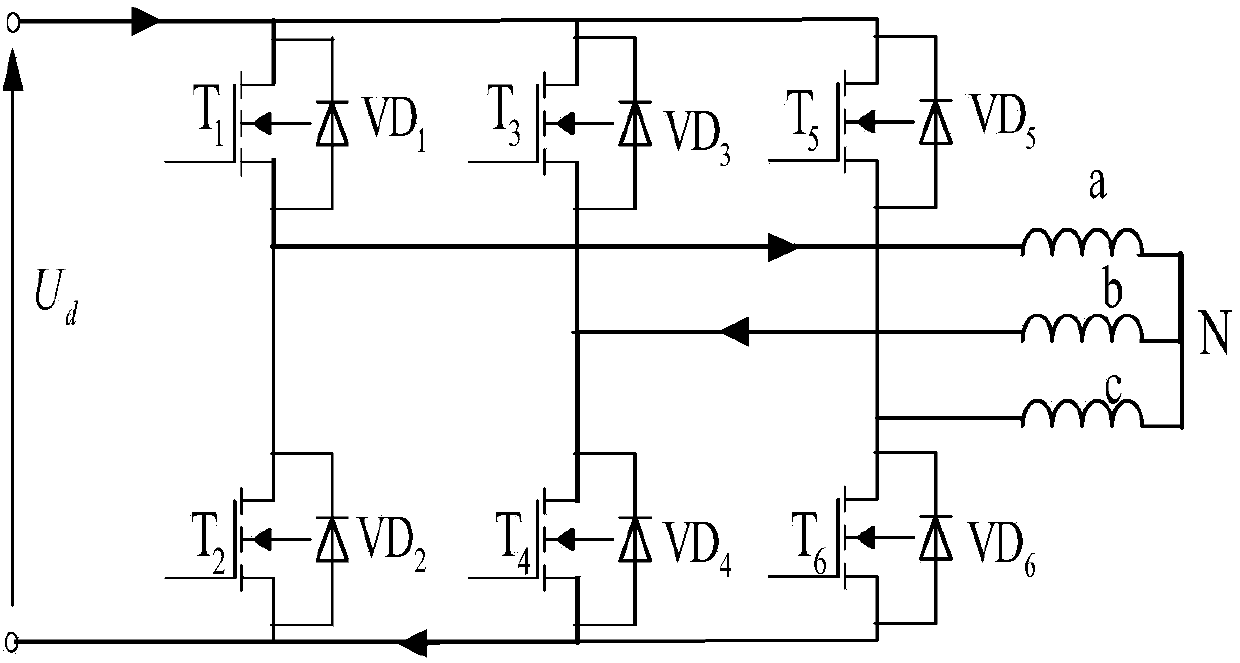
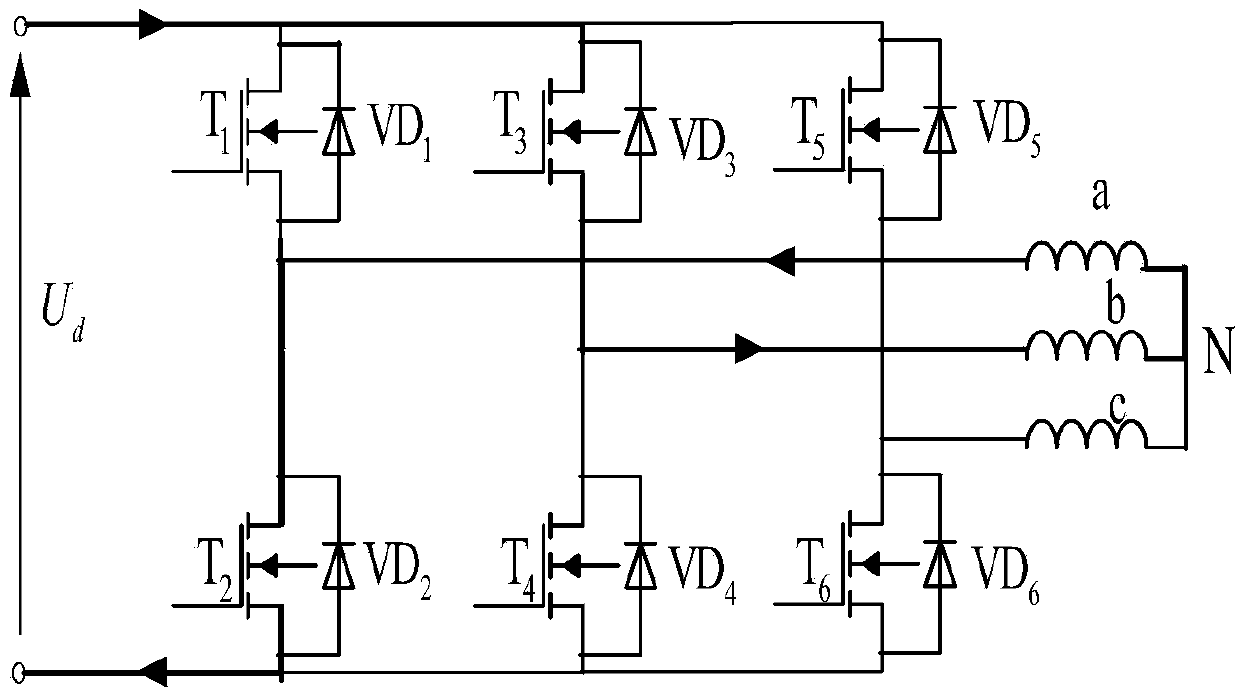
[0049] like figure 1 Shown is a method for detecting the initial position of the rotor of an electric robot. Firstly, three high-frequency and low-voltage pulses are applied to the permanent magnet motor by controlling the three-phase inverter (drive circuit), and the average current gradient method is used to calculate L ab , L bc and L ac , through L ab , L bc and L ac The comparison of the rotor position angle determines the interval of the rotor position angle; then according to the interval of the rotor position angle, a high-frequency low-voltage pulse is applied to the permanent magnet motor by controlling the three-phase inverter. The detection value is transformed into rotating coordinates to finally determine the initial position angle of the rotor; specifically, the following steps are included:
[0050] (1) The control method of two-to-two conduction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More