

Robotic Bionic Hydraulic System
A hydraulic system and robot technology, applied in the field of bionic hydraulics, can solve problems such as high cost, high operating conditions, and poor flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
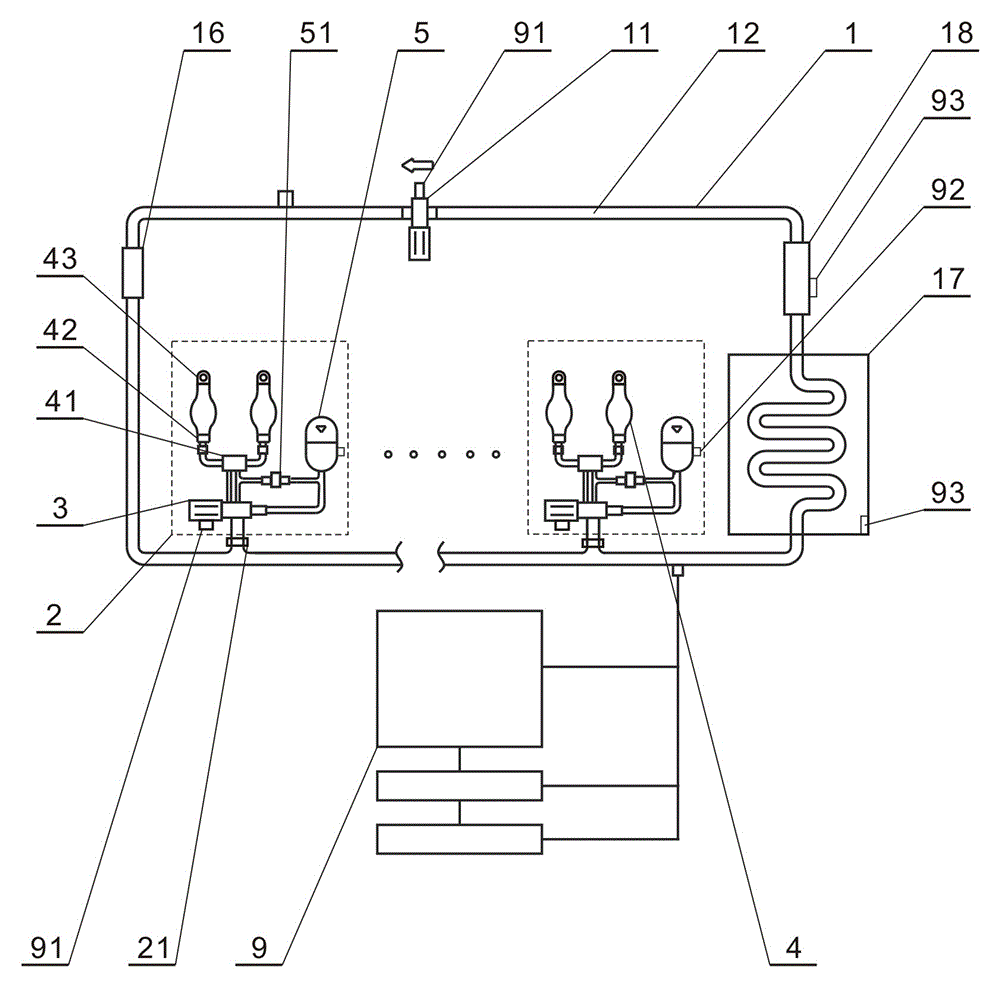
[0032] The present invention is a robot driving system with hydraulic pressure as the driving source, which is used to control and complete various body movements of the robot, such as walking, running, jumping or falling, etc., so that the body movement of the robot can simulate the movement of the human body or animal body and has biomechanical properties.
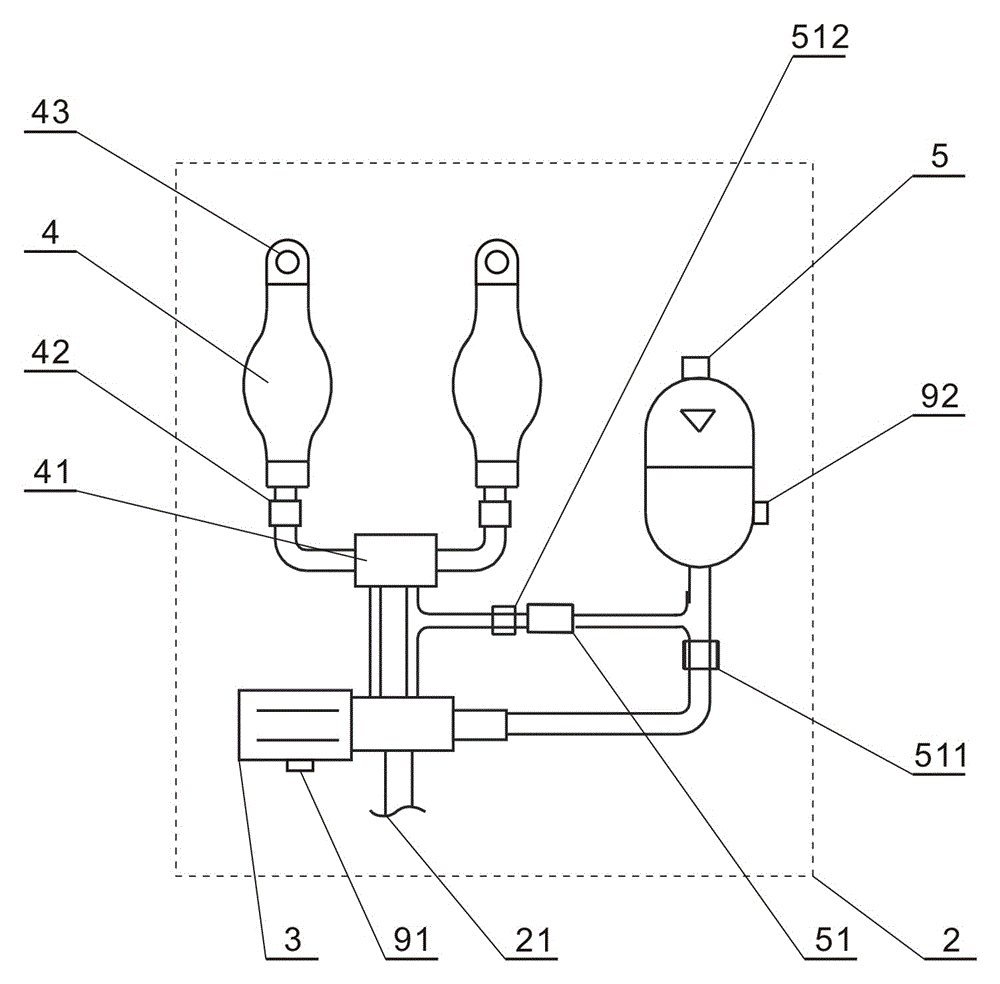
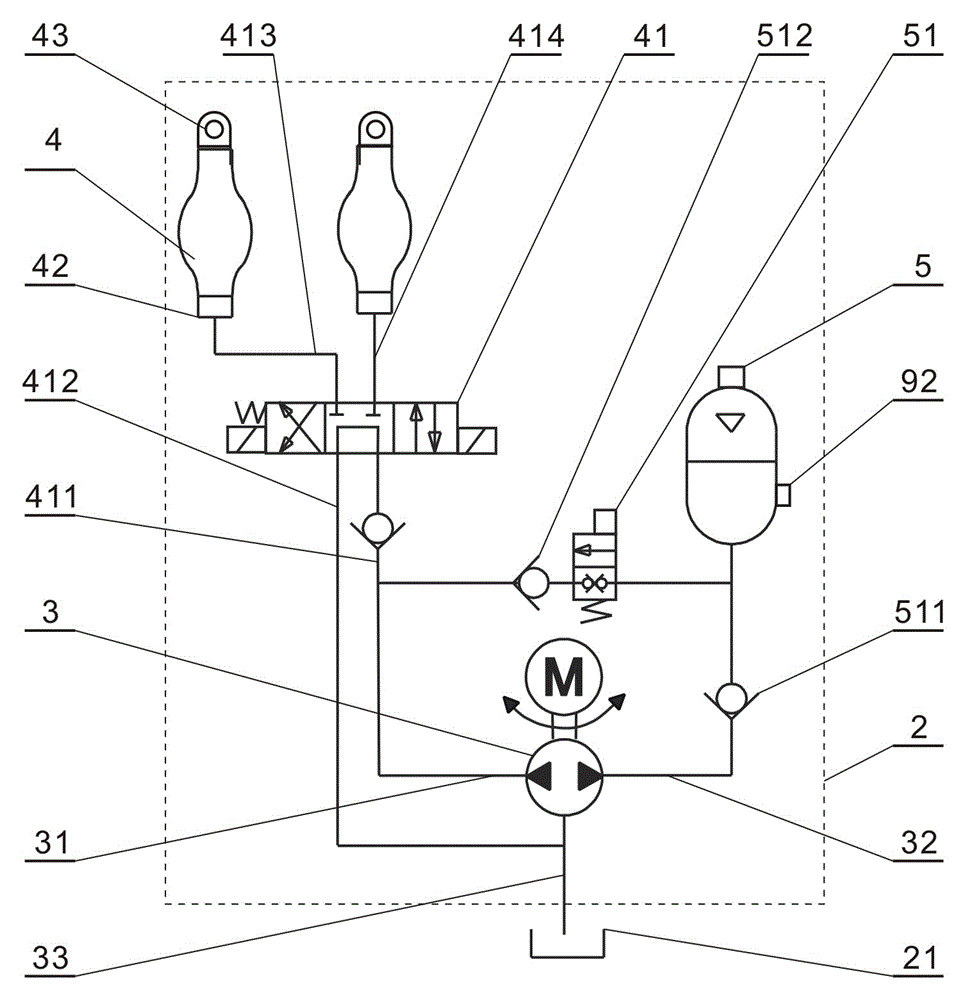
[0033] The composition of the technical solution of the present invention includes a hydraulic oil supply circulation system 1 , several bionic execution units 2 and a CPU central controller 9 .
[0034] The hydraulic oil supply circulation system 1 of the present invention includes an oil delivery pump 11, an oil circuit 12, a filter 16, a temperature regulator 17, an electrostatic oil purifier 18, and a bionic execution unit access point 21. The output end is sequentially connected to the filter 16, the access point 21 of the bionic execution unit, the temperature regulator 17, the electrostatic oil purifier 18, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More