

Hierarchical identification method applicable to control parameters of teleoperation system
An operating system and hierarchical identification technology, applied in the field of system control parameter identification, can solve problems such as the increase in the number of parameters to be identified and the amount of calculation, the unsatisfactory identification accuracy, and the long convergence period of identification parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
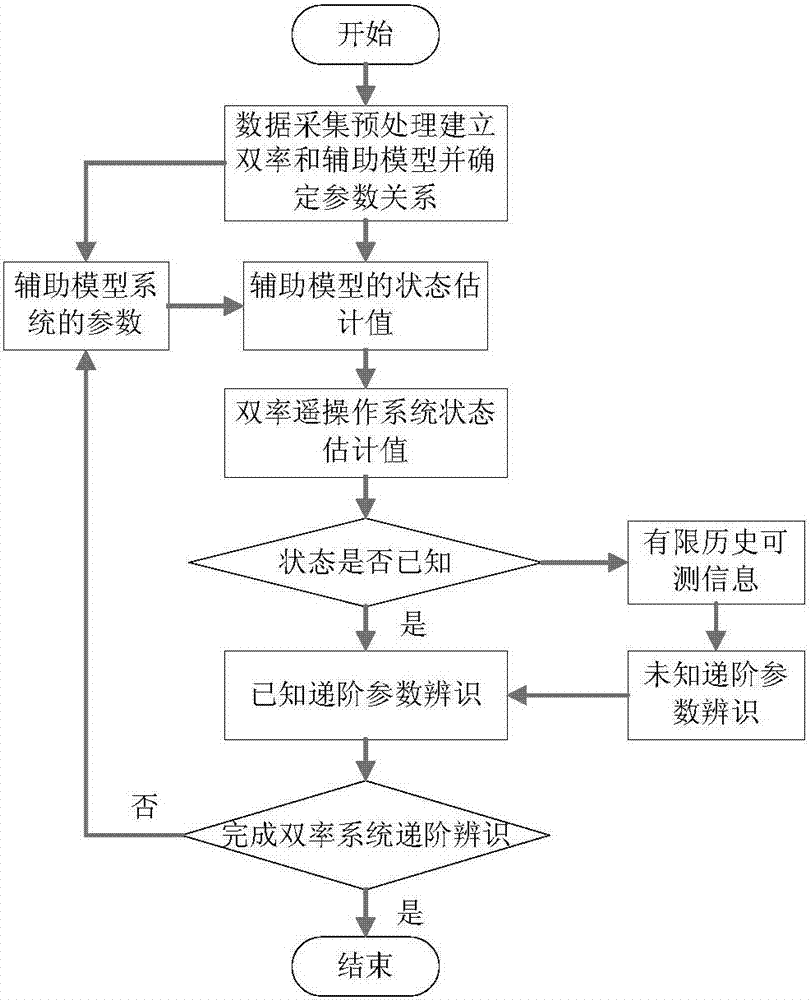
[0056] The flowchart of the embodiment of the present invention is as figure 1 As shown, it includes the following four steps:
[0057]Step 1: Collect the input control signal and output feedback signal of the remote operation. The input control signal is the position and torque signal of the hand controller at the end, and the output feedback signal includes the position, speed and torque signal of the arm joint of the remote operation robot. Neglecting the influence of system time delay and considering that the sampling frequency of the output feedback signal is lower than the frequency of the input control signal, the teleoperation process is simplified into a dual-rate system model after processing the input and output signals, and its state space model is:
[0058] x ( K ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More