

Setting method of robot spray gun trajectory in copper plate spraying operation
A technology in robots and operations, applied in the field of setting the trajectory of a robot spray gun, can solve problems such as cumbersome locks, and achieve the effects of reducing spraying costs, improving coating uniformity and quality, and improving nozzle efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The setting method of robot spray gun trajectory in the copper plate spraying operation of the present invention comprises the following steps:
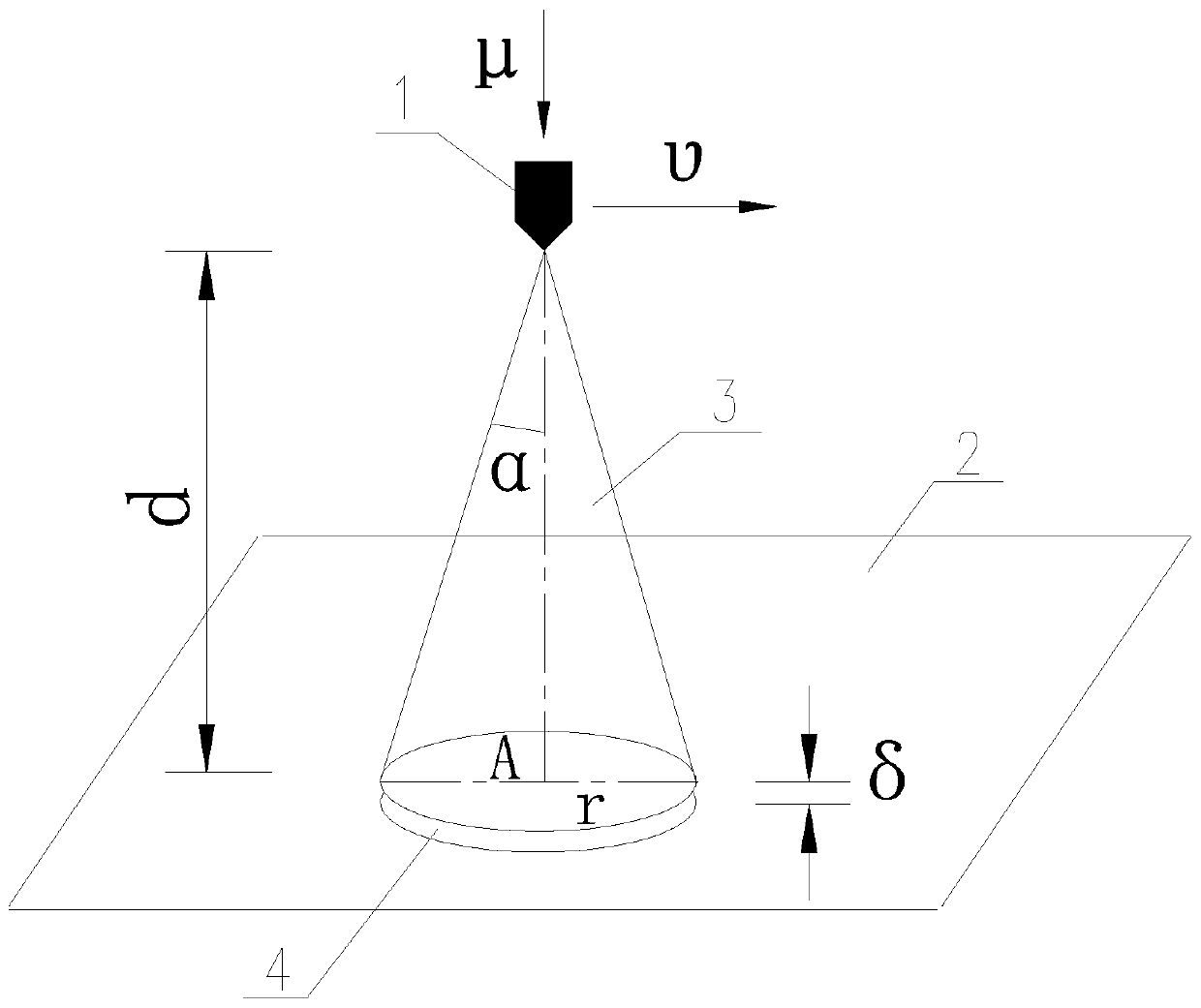
[0015] Step 1, such as figure 1 As shown, in the spraying area of the spraying gun, the geometric model of the spraying process of the robot spraying gun 1 is a spraying cone 3, that is, the spraying medium from the spraying gun 1 to the surface of the copper plate 2 forms a cone. The distance from the surface of the copper plate 2 is d, the moving speed of the spray gun 1 is υ, the spraying angle is α, and the spraying area is a circular area 4 with a conical bottom surface, then the area of the circular area is A=πr 2 , where r is the radius of the circle, radius r = d*tanα, to obtain a coating with a thickness of δ, in order to determine the thickness distribution model of the spray deposition, the robot conducts a single linear reciprocating spray on the copper plate for experimental research, in a specific Under the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More