

Airborne distribution type POS (position and orientation system) transfer alignment method based on parameter identification
A technology of transfer alignment and parameter identification, applied in the field of strapdown inertial navigation system, which can solve the problems of divergence, inability to guarantee the accuracy of system state model and noise statistical characteristics, and difficulty in guaranteeing the accuracy of parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
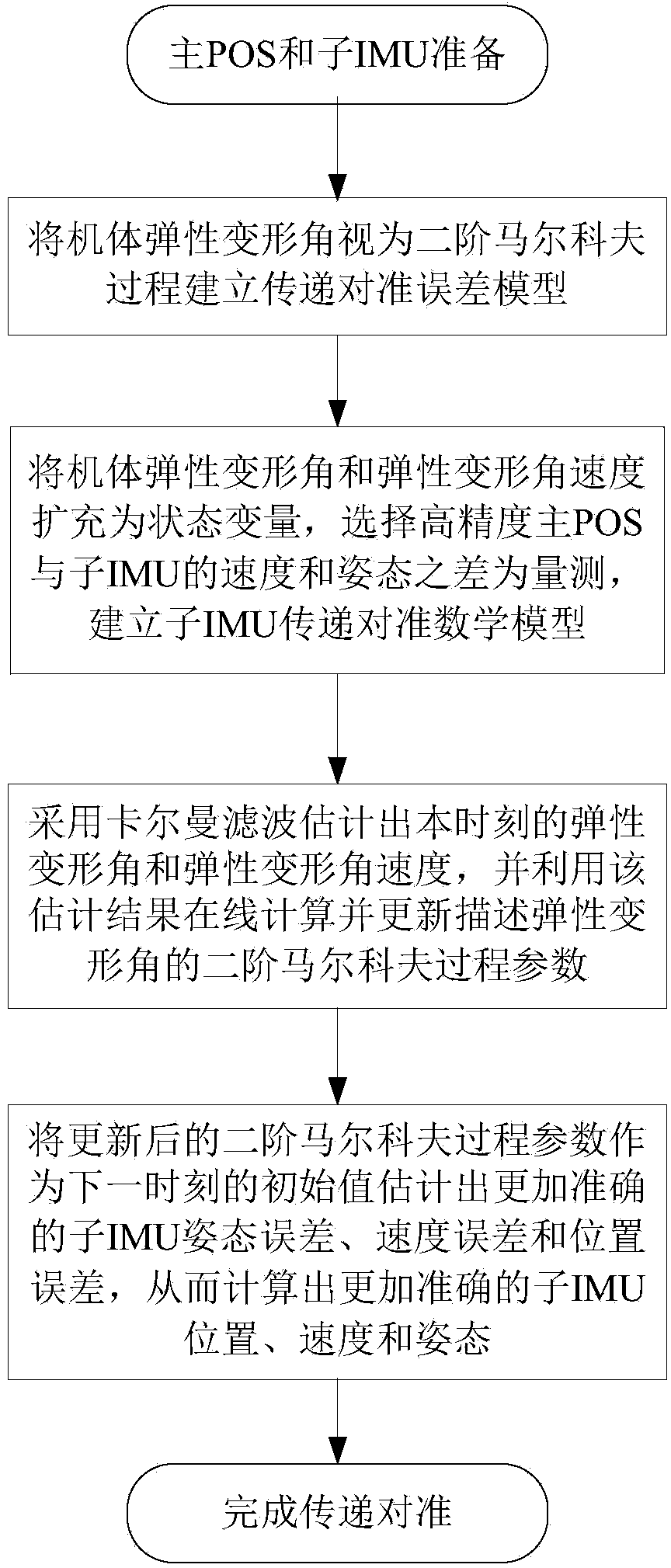
[0095] Such as figure 1 Shown, concrete method of the present invention implements as follows:
[0096] 1. Establish a transfer alignment error model including a sub-IMU inertial navigation error model and an angular error model between main subsystems
[0097] The specific transfer alignment error modeling steps are:
[0098] (1) Establish sub-IMU inertial navigation error model
[0099] The definition of the relevant reference coordinate system includes: record i as the geocentric inertial coordinate system; 1 Indicates; the origin of the carrier coordinate system is the center of gravity of the carrier, the x-axis is to the right along the horizontal axis of the carrier, the y-axis is forward along the longitudinal axis of the carrier, and the z-axis is upward along the vertical axis of the carrier. This coordinate system is fixed on the carrier, usually called right front up Carrier coordinate system, use a and b to represent the carrier coordinate system of the main PO...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More