

Dynamics and kinematics estimation method for deep sea operation type ROV
An underwater robot and dynamics technology, applied in the direction of instruments, calculations, special data processing applications, etc., can solve problems such as thruster installation angle, position thruster thrust vector error, ROV maneuverability stability control influence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
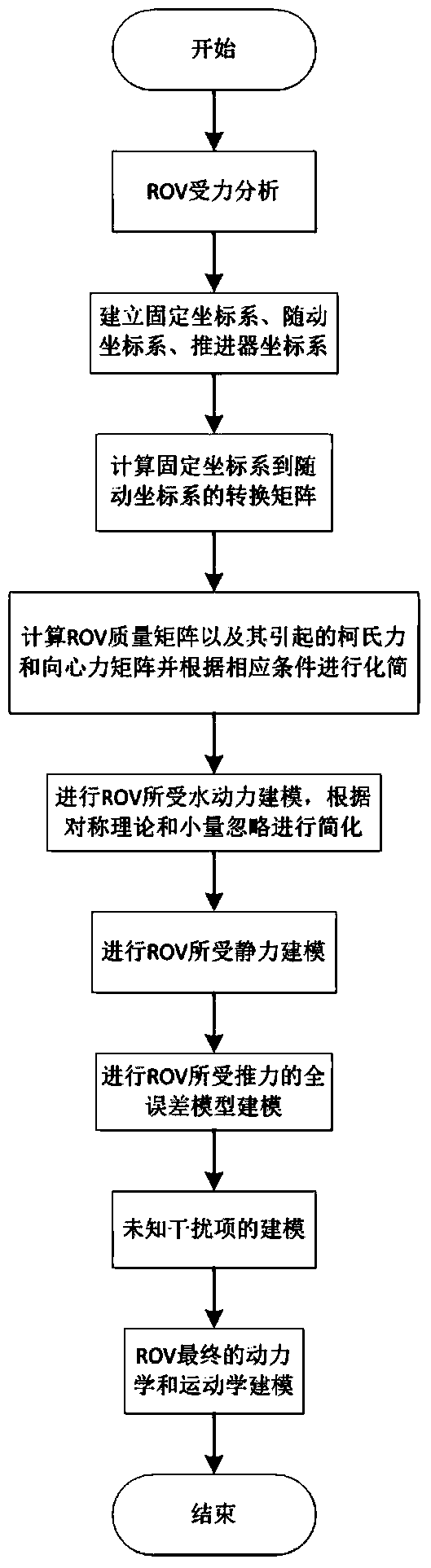
[0167] (1) Analyze the stress of deep sea operation ROV. Including hydrodynamic force, static force, propeller thrust, cable force, influence of ocean current and recoil force of manipulator, etc.
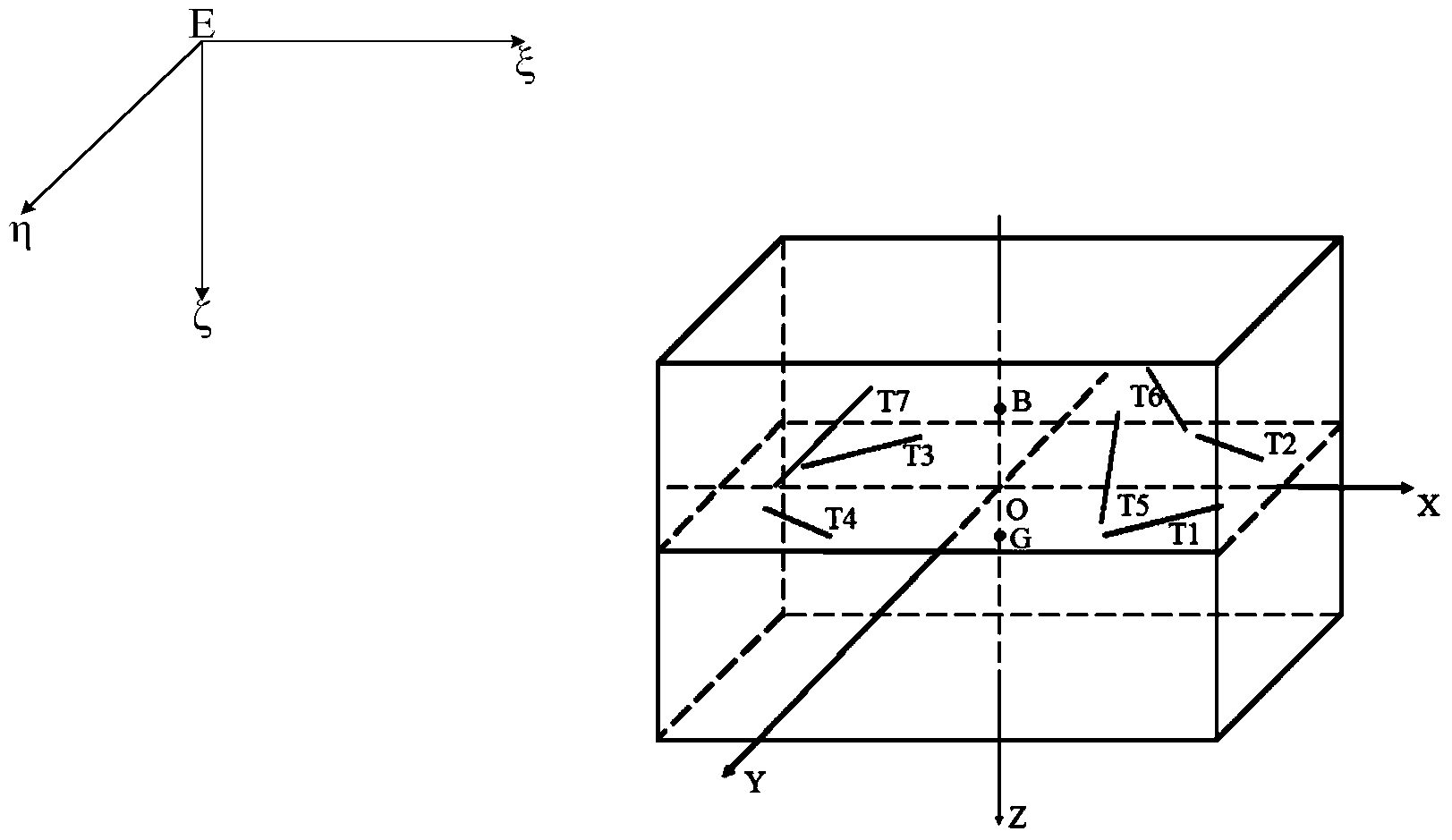
[0168] (2) Steps to establish a fixed coordinate system
[0169] Neglecting the influence of the earth's surface acceleration relative to the low-speed ROV, the fixed coordinate system can be considered as an inertial coordinate system. The origin E can be selected at a fixed point on the earth, such as any point on the sea surface or in the sea. The Eξ axis is located on the horizontal plane, and the main heading of the ROV is positive; the Eη axis is located on the horizontal plane where the Eξ axis is located, and the Eξ axis is rotated clockwise by 90° according to the right-hand rule; the Eζ axis is perpendicular to the ξEη coordinate plane, pointing to the center of the earth is positive . The schematic diagram of the fixed coordinate system is as follows figure 2 shown....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More