Mechanical arm
A technology of manipulator and mechanical arm, applied in the direction of manipulator, claw arm, chuck, etc., can solve the problems of low efficiency, complex manipulator structure, large space occupation, etc. The effect of easy structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
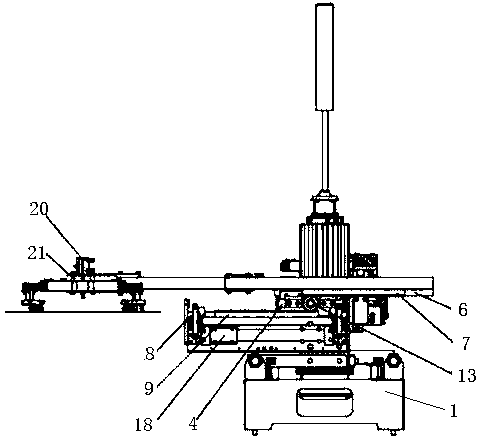
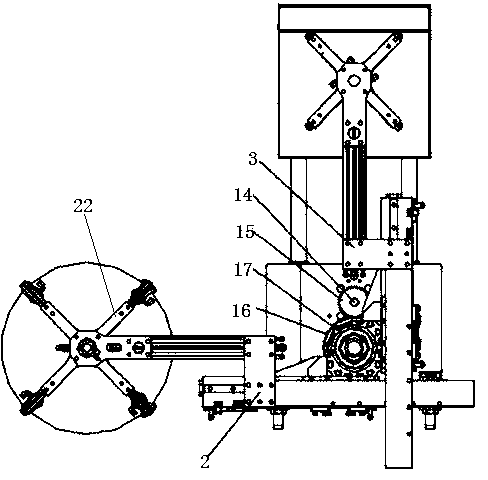
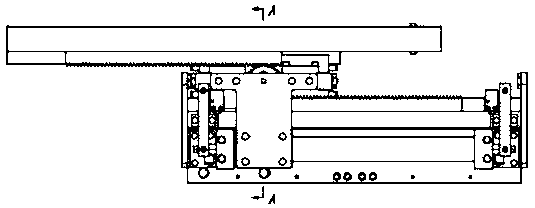
[0036] like figure 1 , figure 2 , image 3 and Figure 4 Shown, a kind of manipulator comprises base 1, and is located on base 1 pneumatic swing angle cylinder 14, rotating mechanism, telescoping mechanism and sucker device, and described driving device is connected with rotating mechanism, is used to drive rotating mechanism to rotate, and The telescoping mechanism is connected with the rotating mechanism, the rotating mechanism drives the telescopic mechanism to rotate, the telescopic mechanism is connected with the suction cup device, the telescoping mechanism includes a mechanical arm, and the mechanical arm is two intersecting mechanical arms arranged at 90 degrees, They are the first mechanical arm 2 and the second mechanical arm 3 respectively, and each of the mechanical arms corresponds to a slide plate 4 and a manipulator mount 5 connected to the rotating mechanism, and the upper linear guide rail 6 is arranged on the lower surface of each mechanical arm and the u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com