

Space manipulator control system software architecture based on C/S structure and establishing method
A technology of space manipulator and control system, applied in general control system, control/regulation system, adaptive control, etc., can solve the problems of huge software architecture system, multiple functions, strong dependence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
[0089] A C / S structure-based space manipulator control system software architecture, which includes the following:
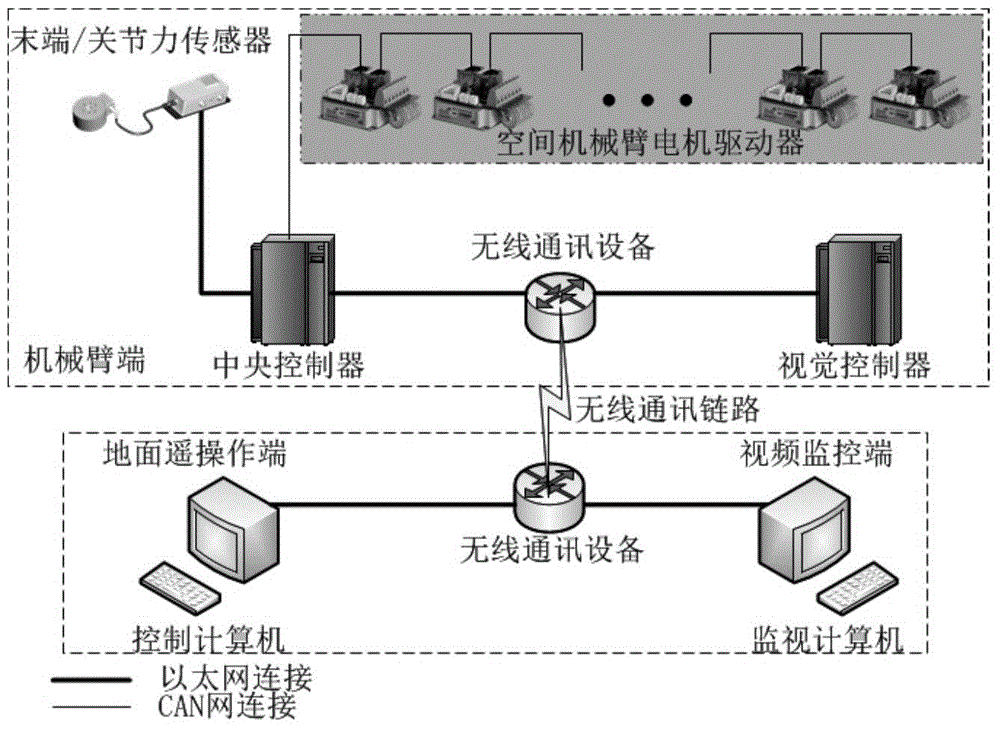
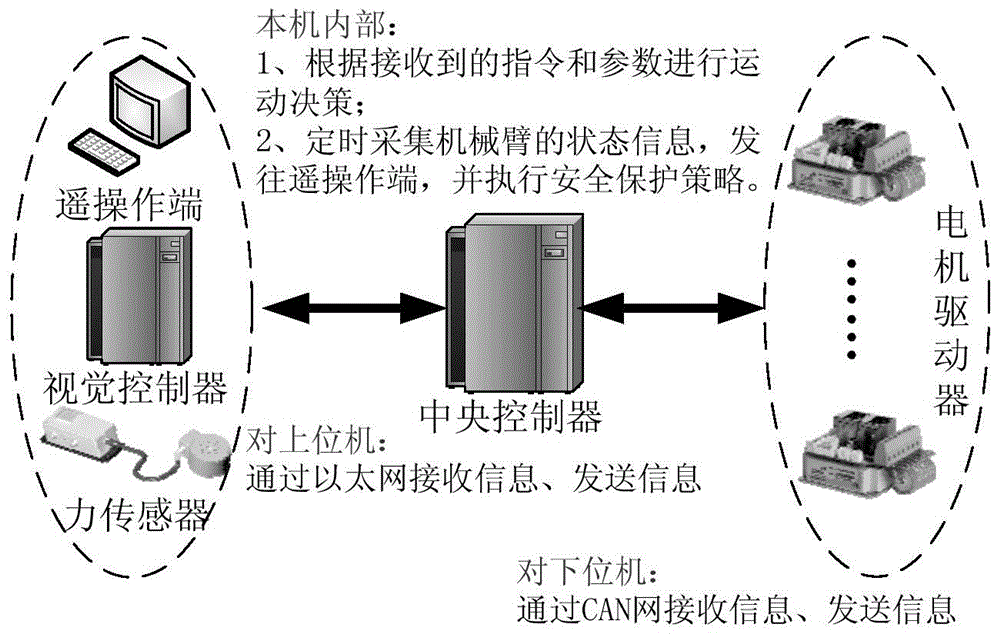
[0090] 1) The topological diagram of the C / S structure space manipulator control system based on the present invention is as follows figure 1 As shown, the control command of the space manipulator is sent from the remote operation terminal (Client) on the ground to the central controller (Server) on the manipulator. After receiving the control command, the central controller implements corresponding control on the manipulator according to the command; On the other hand, the central controller also transmits the status information of the main components of the robotic arm to the ground in real time, so that the operator can monitor the status of the robotic arm at any time. It can be seen from the figure that the central control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More