

Modularized hydraulic mechanical arm experimental platform and method based on interaction of virtual and reality
A technology of hydraulic machinery and experimental platform, which is applied in simulators, instruments, control/regulation systems, etc., can solve the problems of lack of hydraulic experimental platform and complex composition of hydraulic manipulator system, and achieve dynamic test conditions, cost saving, and strong The effect of scaling performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention is described in detail below in conjunction with accompanying drawing:
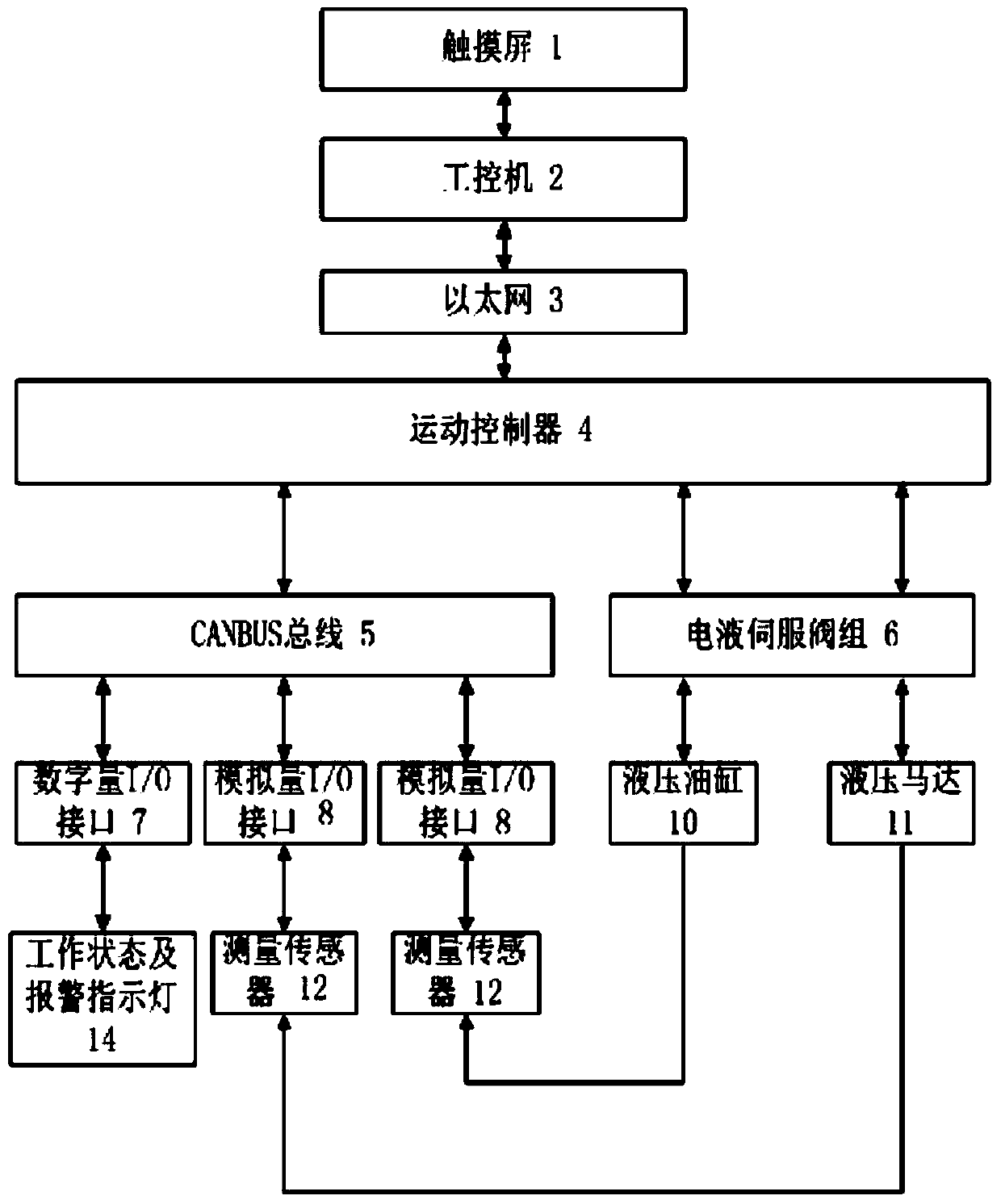
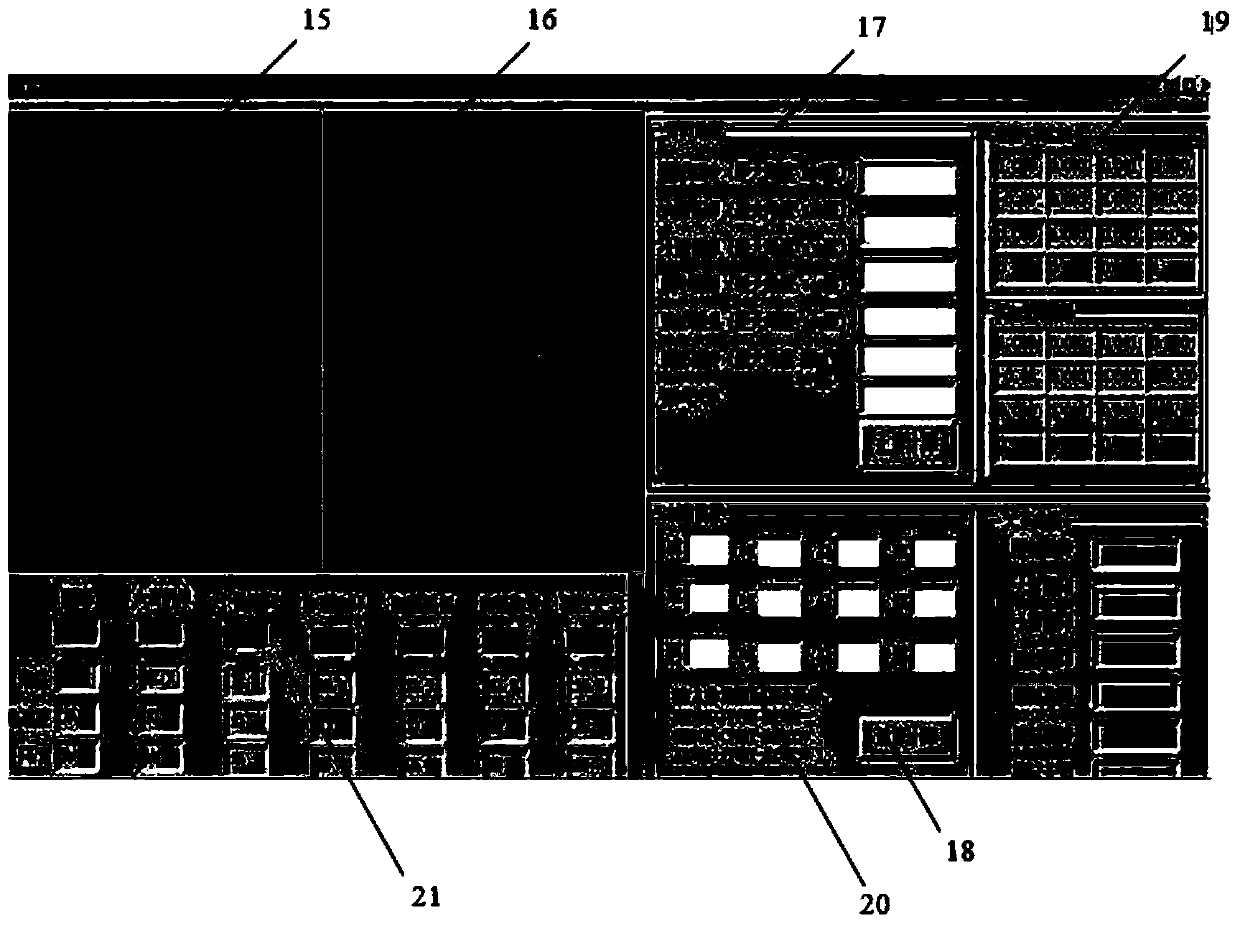
[0045] Such as figure 1 As shown, the touch screen computer 1 is connected to the embedded industrial control computer 2, and the embedded industrial control computer 2 is connected to the motion controller 4 through the Ethernet 3. The industrial computer is the running platform of the main control program, and the touch flat console is used to display the main control The system interface is the window of human-computer interaction, such as figure 2 Shown includes a virtual simulated manipulator dynamic display area 15, a virtual measured manipulator dynamic display area 16, kinematics forward and reverse solution analysis windows 17, 18, a joint working state display area 19, a manipulator end pose display area 20 and a system control District 21 seven parts. The user inputs the motion parameters of each joint, calculates the theoretical end pose of the manipulator throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More