

A low-dimensional intercoupling double-cross beam six-dimensional force and moment sensor
A torque sensor and double cross technology, applied in the field of sensors, to achieve the effect of reducing inter-dimensional crosstalk, low inter-dimensional coupling, and reducing inter-dimensional coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further explained below in conjunction with the accompanying drawings.
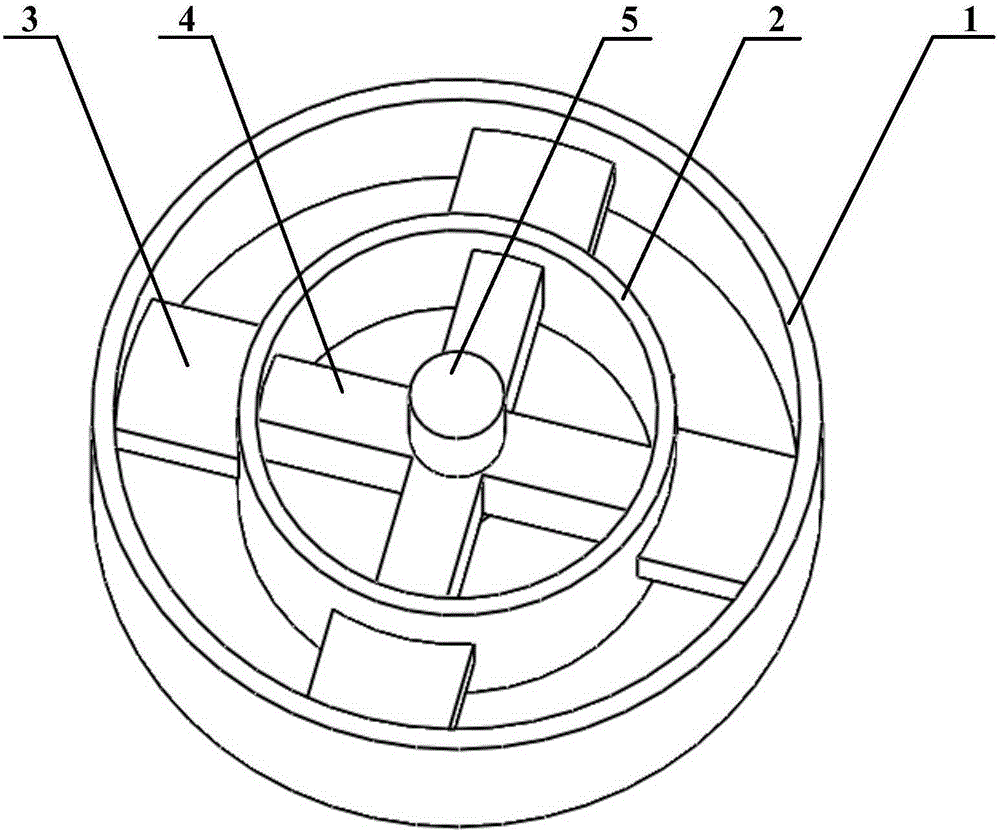
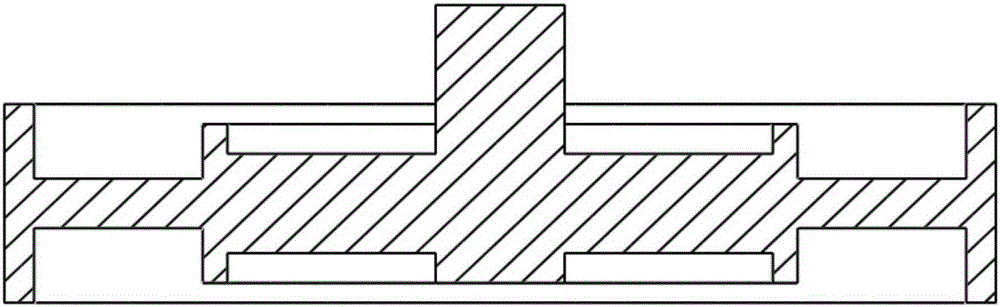
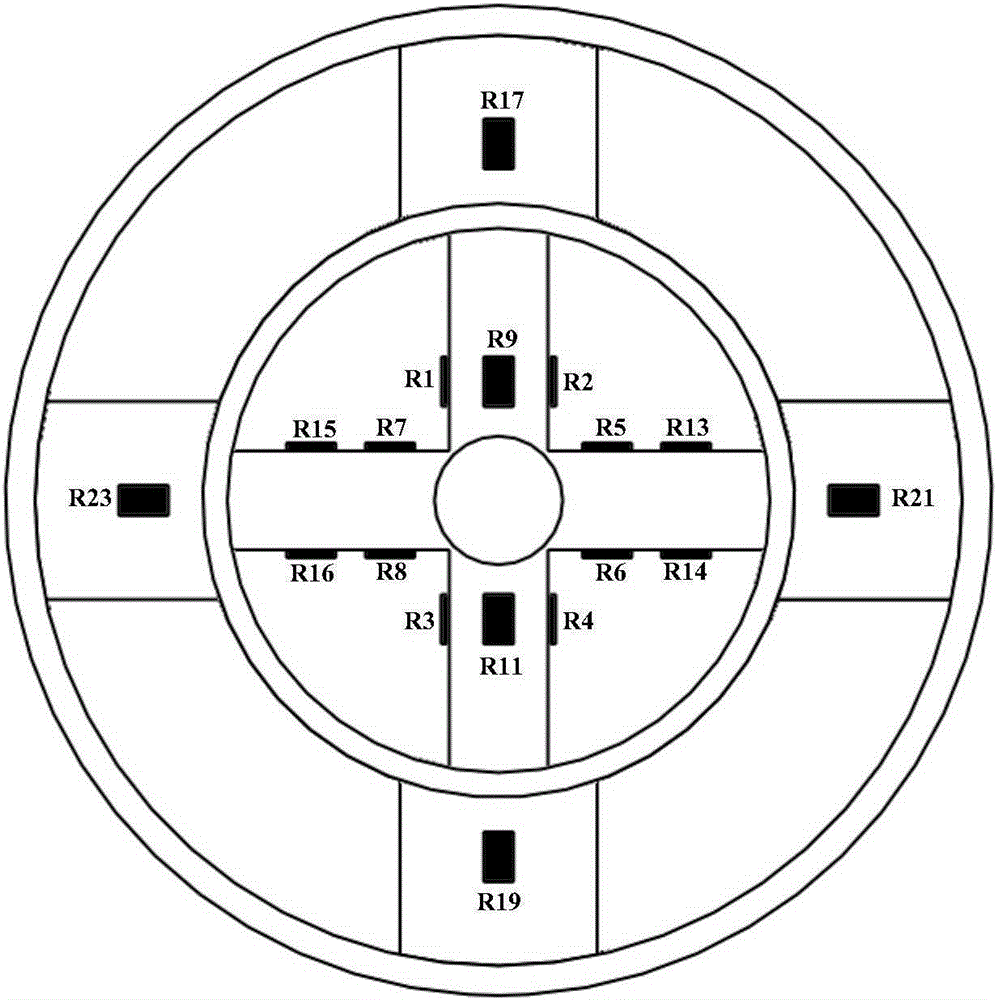
[0036] A low-dimensional intercoupling double-cross beam type six-dimensional force and moment sensor, including an elastic body structure and six sets of strain gauges. Such as figure 1 As shown, the elastomer structure includes an outer ring wall 1 , an inner ring wall 2 , four outer ring stress beams 3 with the same structure, four inner ring stress beams 4 with the same structure, and a central loading shaft 5 . The geometric center of the outer ring wall 1 is defined as the origin O to define a XYZ three-dimensional Cartesian coordinate system, and the central cross-sections of the outer ring wall 1, the inner ring wall 2, the outer ring stress beam 3, and the inner ring stress beam 4 are all located on the XOY plane Above, except for the central loading axis 5, the elastomeric structure is symmetrical about the XY coordinate plane. The central axis of the centr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More