

Parameter setting method for robust controller of direct current motor
A robust controller and DC motor technology, applied in general control systems, control/adjustment systems, instruments, etc., can solve the problems of cumbersome and time-consuming controller design, achieve unique and effective parameters, reduce the amount of calculation, and simplify parameters The effect of the tuning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
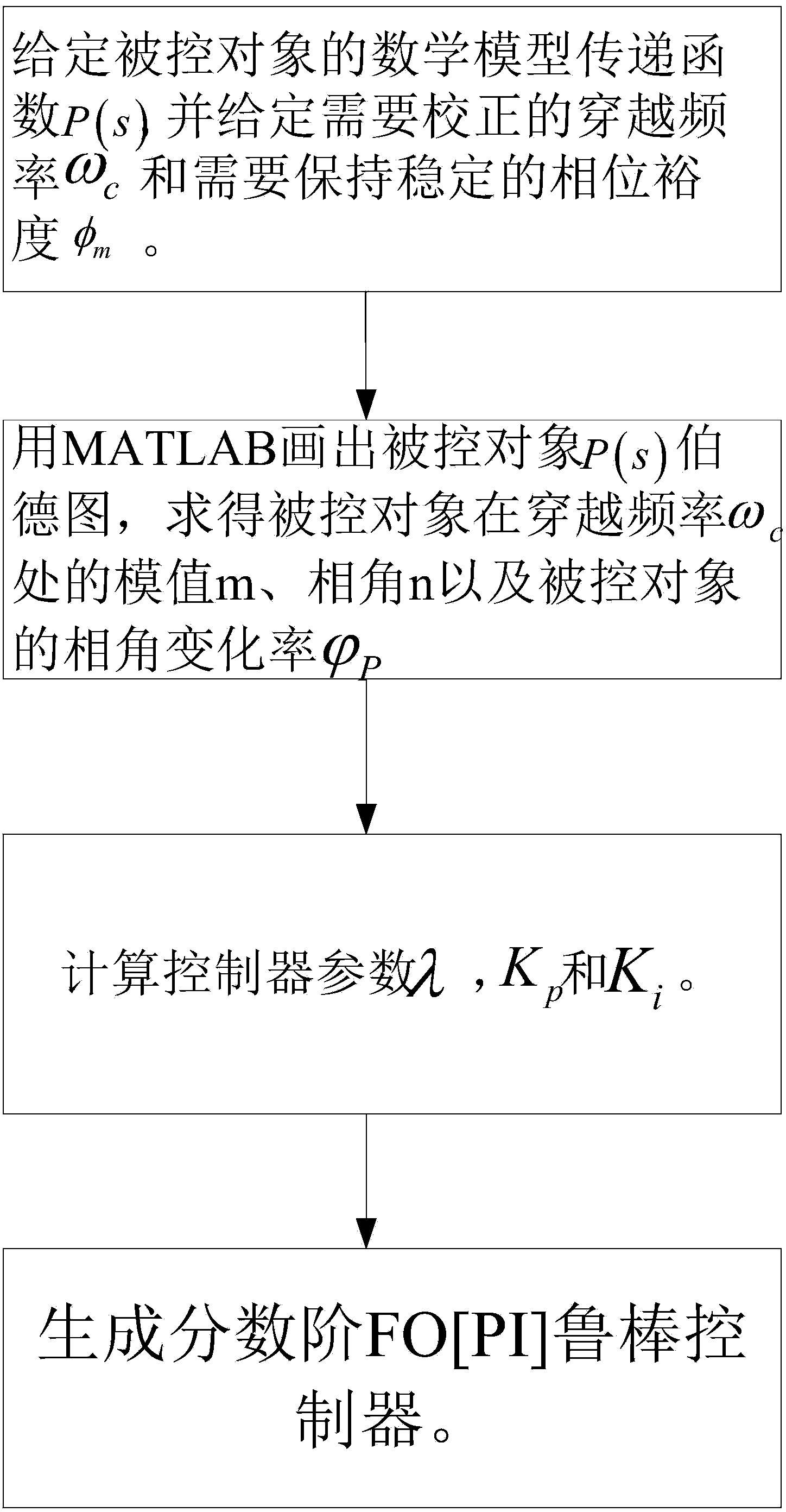
[0044] 1. Assuming the mathematical model transfer function of the controlled object system of the DC motor where T = 0.4. And given the crossover frequency ω c =10rad / s and need to maintain a stable phase margin φ m =70°.
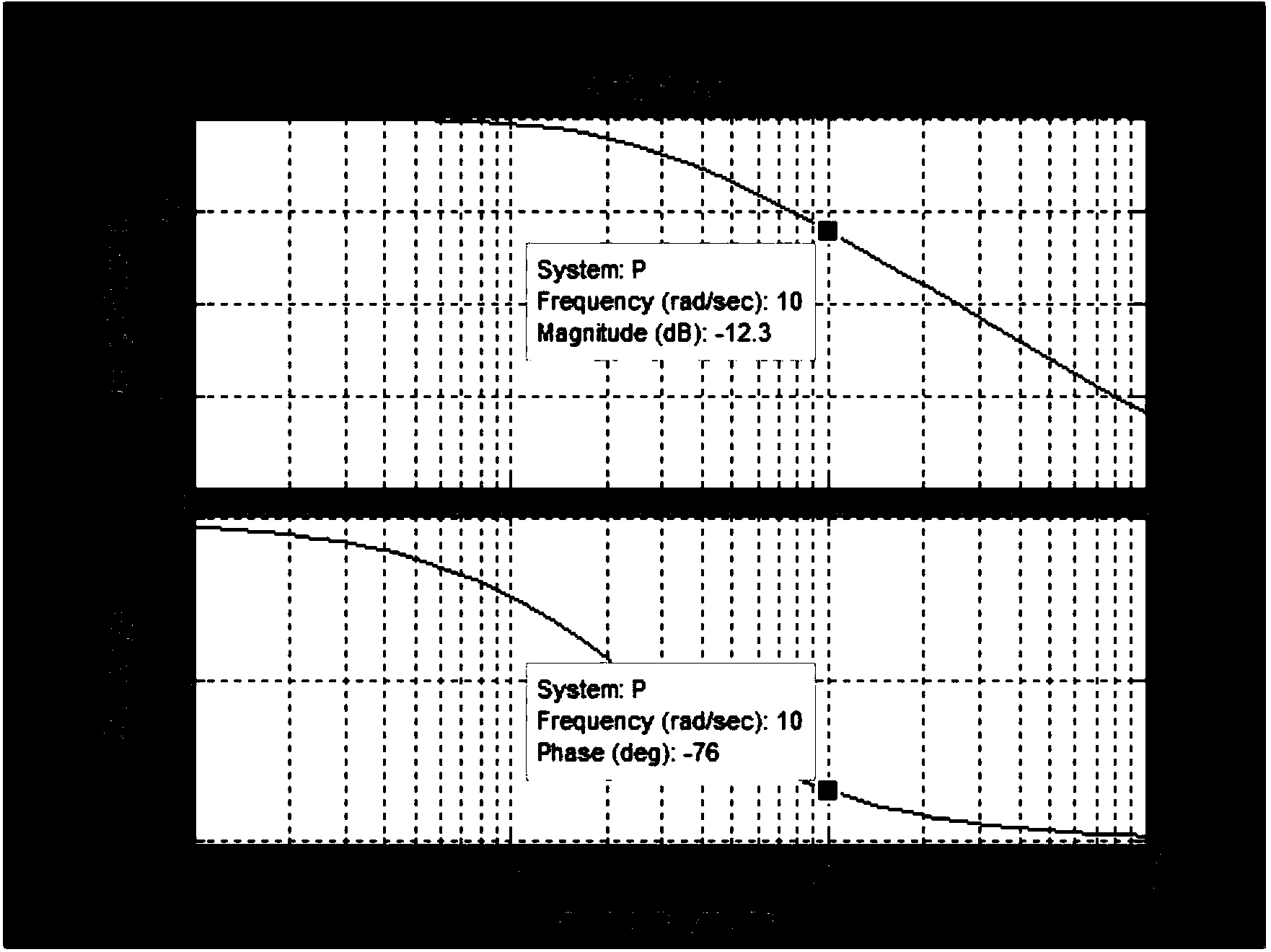
[0045] 2. Obtain the modulus value of the controlled object at the frequency of 10rad / s -12.3dB and the phase angle of -76°, and at the same time obtain the phase change rate of the controlled object at the frequency of 10rad / s
[0046] 3. It can be obtained that θ=φ m -n-180°=-34° to get the equation:
[0047]
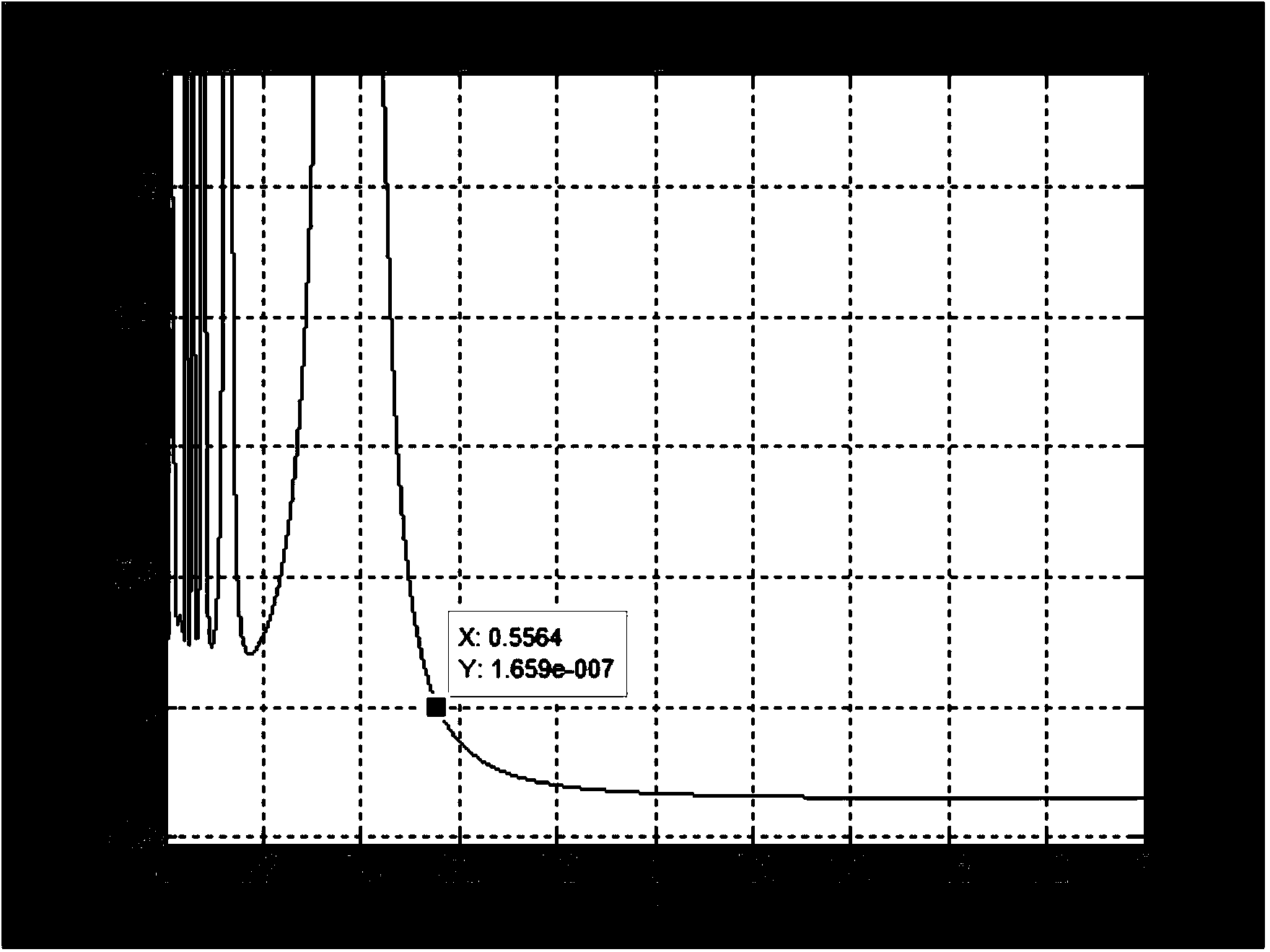
[0048] The fractional integral order λ=0.5564 is obtained by MATLAB graphical method.
[0049] 4. It can be obtained that A=10 -m / 20 =4.1210, so as to obtain the proportional coefficient and integral coefficient K i = ω c A 1 λ sin θ λ = ...
Embodiment 2
[0055] 1. Mathematical model transfer function of DC motor controlled object system Wherein the time constant becomes T=0.1. And given the crossover frequency ω c =30rad / s and need to maintain a stable phase margin φ m =70°.
[0056] 2. Obtain the modulus value of the controlled object at the frequency of 30rad / s -10dB and the phase angle of -71.5°, and at the same time obtain the phase change rate of the controlled object at the frequency of 30rad / s
[0057] 3. It can be obtained that θ=φ m -n-180°=-38.5° to get the equation:
[0058]
[0059] The fractional integral order λ=0.6657 is obtained by MATLAB graphical method.
[0060] 4. It can be obtained that A=10 -m / 20 =3.1623, so as to obtain the proportional coefficient and integral coefficient K i = ω c A 1 λ sin θ λ ...
Embodiment 3
[0066] 1. There is often a delay in the actual system, assuming the mathematical model transfer function of the controlled object of the DC motor Where T=0.4, L=0.01. And given the crossover frequency ω c =10rad / s and need to maintain a stable phase margin φ m = 50°.
[0067] 2. Obtain the modulus value of the controlled object at the frequency of 10rad / s -12.3dB and the phase angle of -81.8°, and at the same time obtain the phase change rate of the controlled object at the frequency of 10rad / s
[0068] 3. It can be obtained that θ=φ m -n-180°=-48.2° to get the equation:
[0069]
[0070] The fractional integral order λ=0.7904 is obtained by MATLAB graphical method.
[0071] 4. It can be obtained that A=10 -m / 20 =4.1210, so as to obtain the proportional coefficient and integral coefficient K i = ω c A 1 λ sin ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More