

Double-caterpillar-band wall-climbing monitoring robot
A robot and double crawler technology, applied in the field of wall-climbing robots, can solve problems such as weak adsorption capacity and inflexible movements, and achieve the effects of strong load capacity, low cost and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
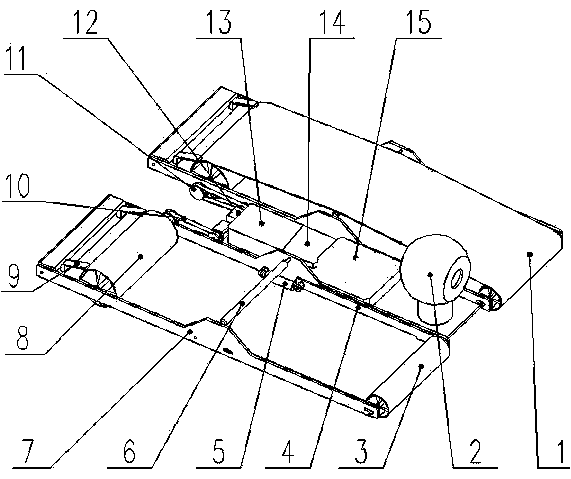
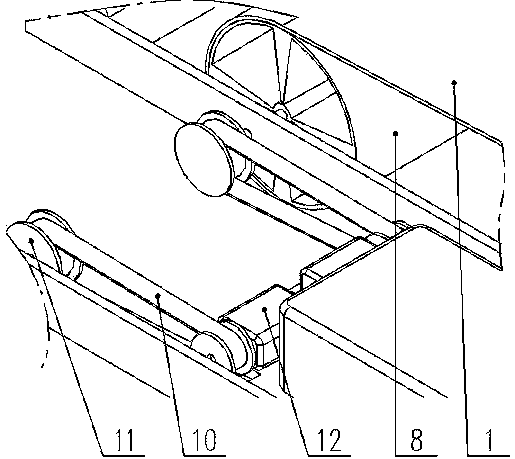
[0018] Such as figure 1 As shown, a double-crawler wall-climbing monitoring robot is provided with a base, and an electrostatic generator 13, a battery pack 14, a control transmission module 15, a camera 2 and a pair of drive motors 12 are fixedly installed in the middle of the base. The battery pack 14 powers the electrostatic generator 13 . The positive and negative poles of the electrostatic generator 13 are respectively connected to the positive and negative brushes 9 via wires. A pair of track frames 7 are symmetrically arranged on both sides of the base, and each track frame 7 is provided with a driving wheel 8 and a driven wheel 3 for driving the track 1 to rotate. The belt pulley 11 is driven to rotate by the corresponding driving motor 12; the crawler belt 1 is covered between the driving pulley 8 and the driven pulley 3 on the crawler belt frame 7, forming a double crawler belt structure.
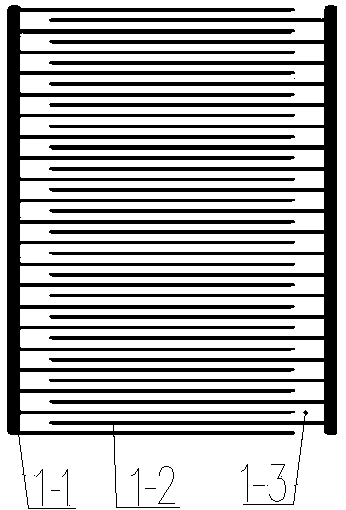
[0019] Such as figure 2 As shown, the crawler 1 is a flexible comb-type b...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Width | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More