

Cubature Kalman Filter (CKF) based IMU/Wi-Fi (Inertial Measurement Unit/Wireless Fidelity) signal tightly-coupled indoor navigation method
An indoor navigation and tight combination technology, applied in the field of navigation, can solve problems such as unsatisfactory filtering effect and poor stability, achieve fast convergence speed, high filtering precision, and improve navigation precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
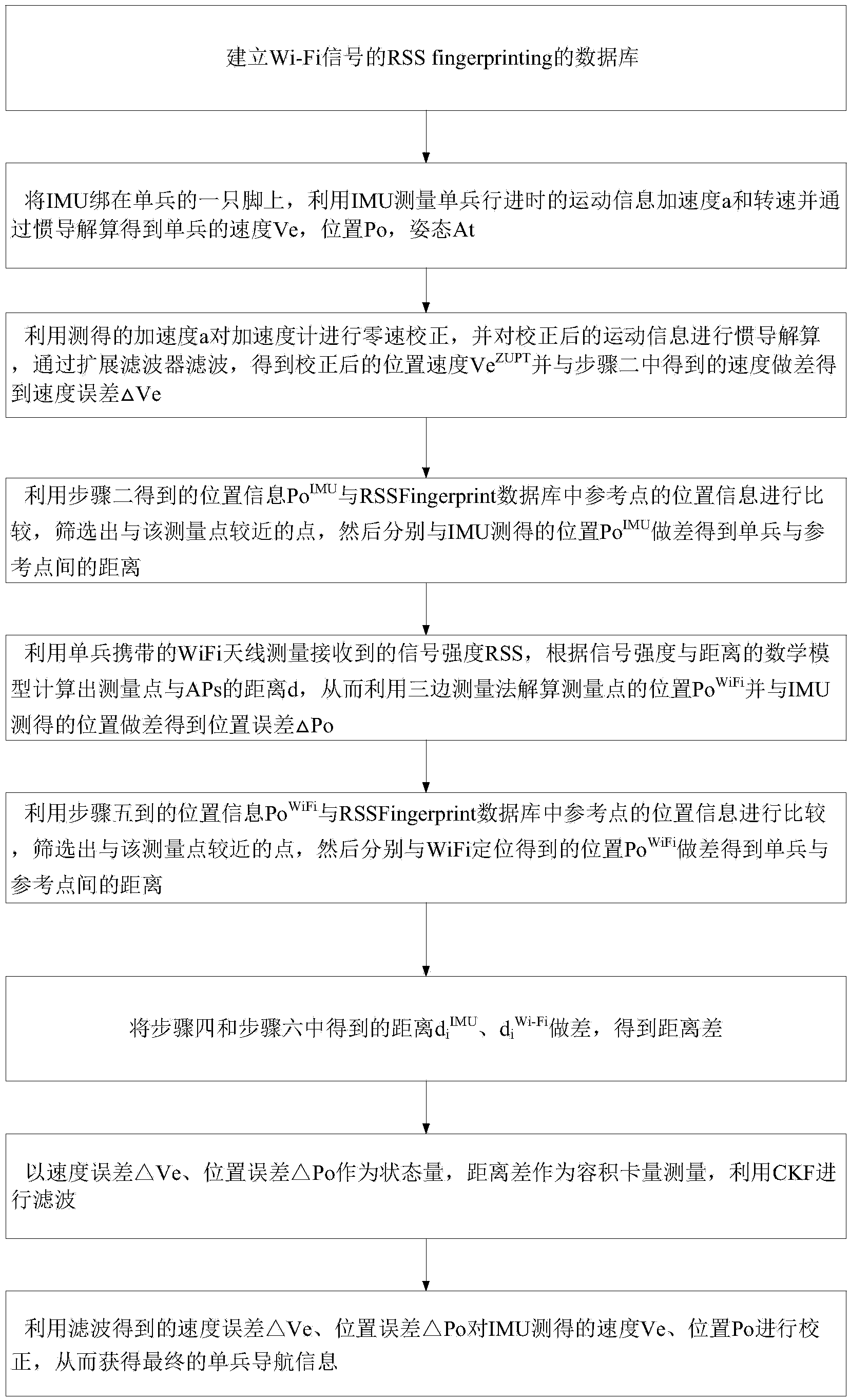
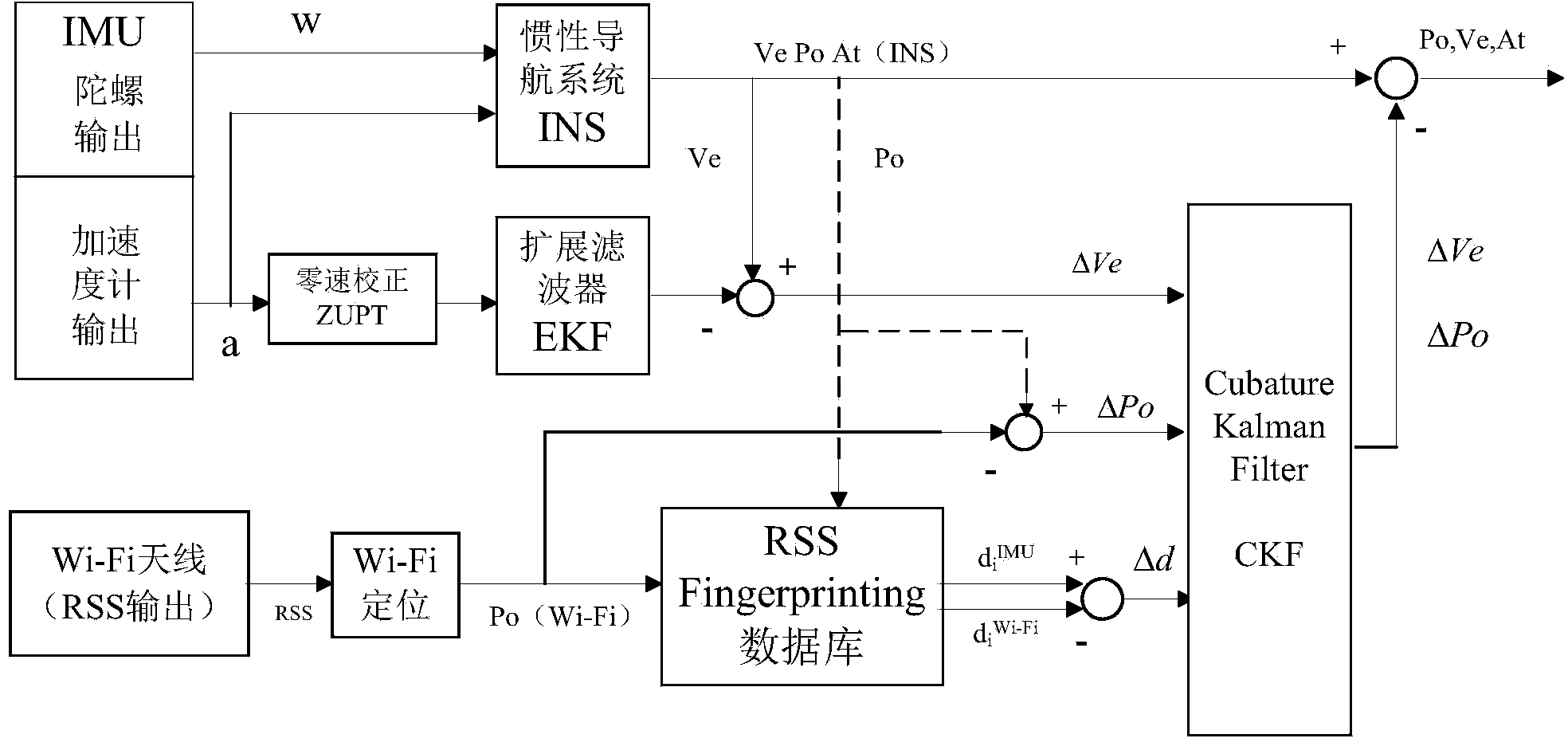
[0032] The invention discloses a CKF-based IMU / Wi-Fi signal tight combination indoor navigation method. The method includes: establishing a database of RSS fingerprinting of the Wi-Fi signal; using the IMU to perform positioning to obtain the pedestrian's position Po IMU And speed, acceleration, attitude and other information; correct the drift of the IMU accelerometer through zero-speed correction, and get the corrected speed; use Wi-Fi signal for positioning, and get the pedestrian's position Po Wi-Fi ; Find and Po respectively in the built database IMU The closest n reference points and Po Wi-Fi The nearest n reference...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More