

Bendable miniature wrist
A miniature, wrist-based technology, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of easy deformation of ropes, easy wear of gear transmission, and difficult application, and achieve the effect of compact structure, small moment of inertia, and fast motion response.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
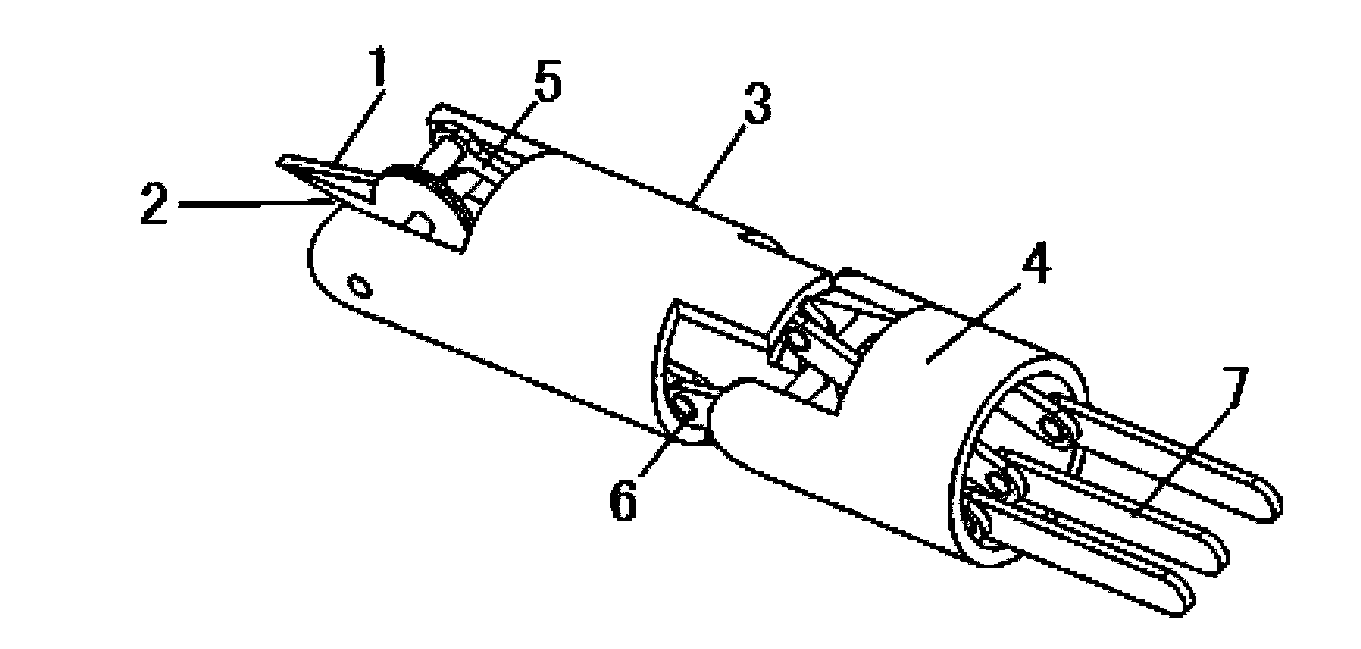
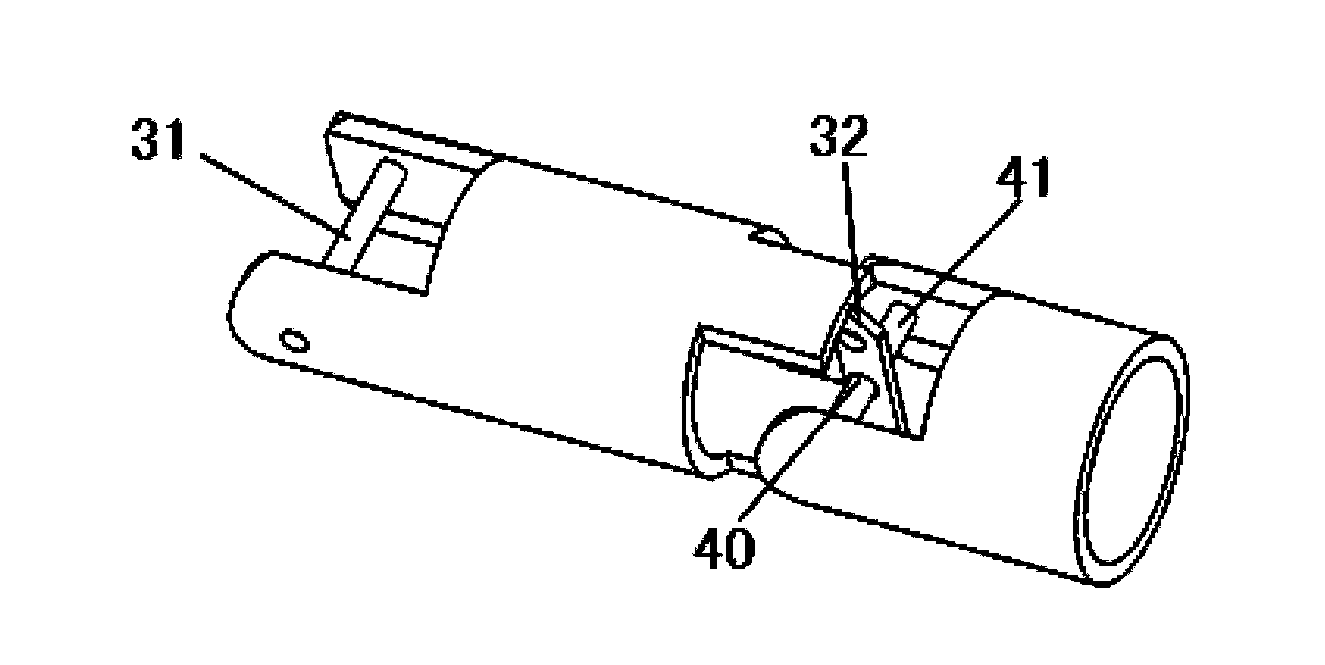
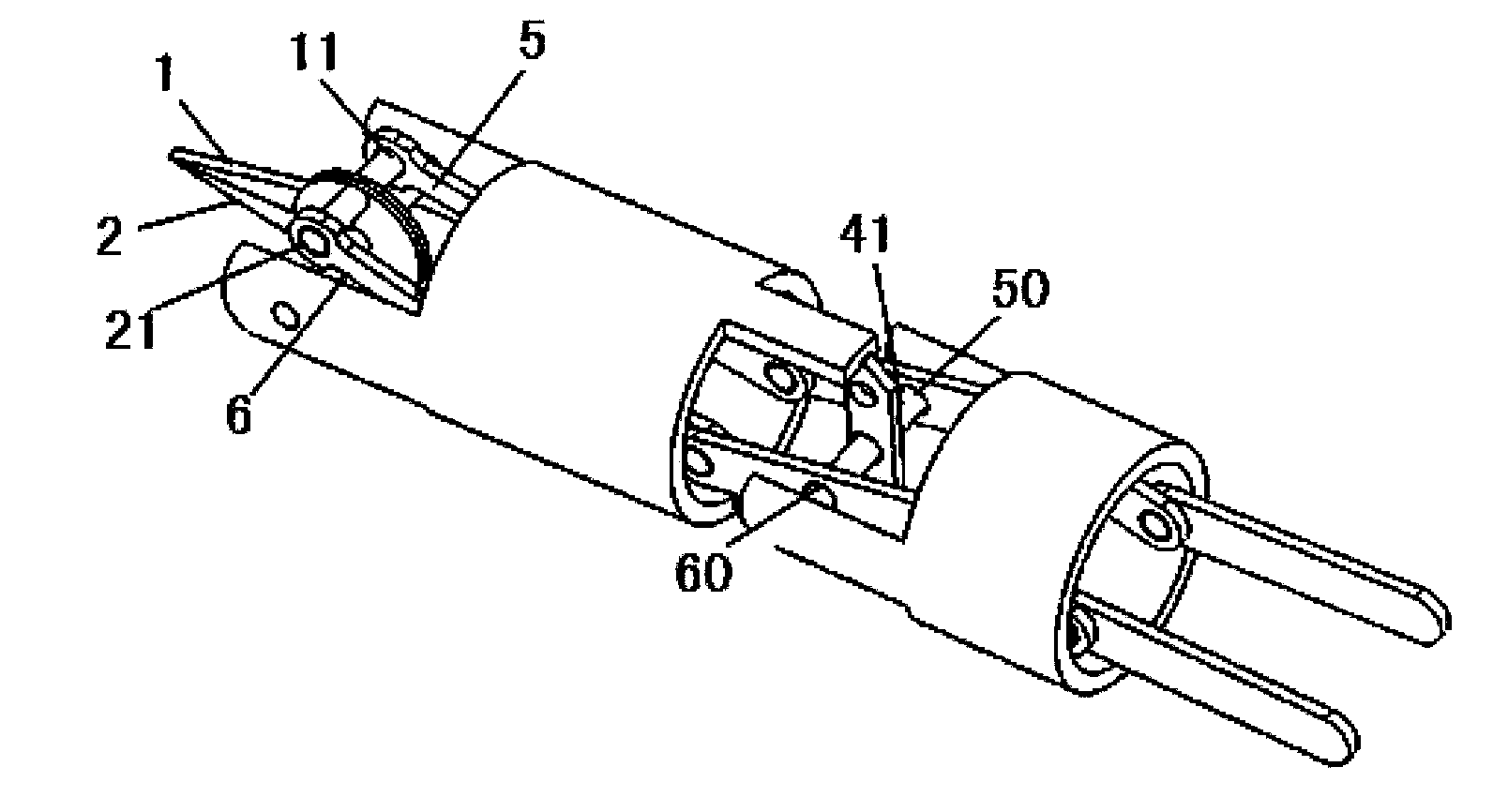
[0019] see figure 1 , with reference to figure 2 , image 3 , Figure 4 , Figure 5 , the flexible micro-wrist of the present invention includes a first end effector 1, a second end effector 2, a first-level sleeve 3, a second-level sleeve 4, a first kinematic branch chain 5, and a second kinematic branch chain 6 and the third kinematic branch 7 . Wherein, the first end effector 1 and the second end effector 2 are combined into clamps or grippers and are respectively rotatably connected with the first-level sleeve 3 (through a rotating pair); the second-level sleeve 4 is connected with the first-level The sleeve 3 is rotatably connected; the first kinematic branch chain 5 is rotatably connected to the first end effector 1, the second kinematic branch chain 6 is rotatably connected to the second end effector 2, and the third kinematic branch chain 7 is rotatably connected to the first end effector 2. The stage sleeve 3 is rotatably connected; the combined movement of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More