

High-precision polishing system for robot and control method thereof
A robot, high-precision technology, applied in grinding automatic control devices, program-controlled manipulators, manipulators, etc., can solve problems such as low degree of automation, shortage of skilled operators, and no solutions, so as to improve debugging time and enhance work efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below according to the accompanying drawings, which is a preferred embodiment of various embodiments of the present invention.
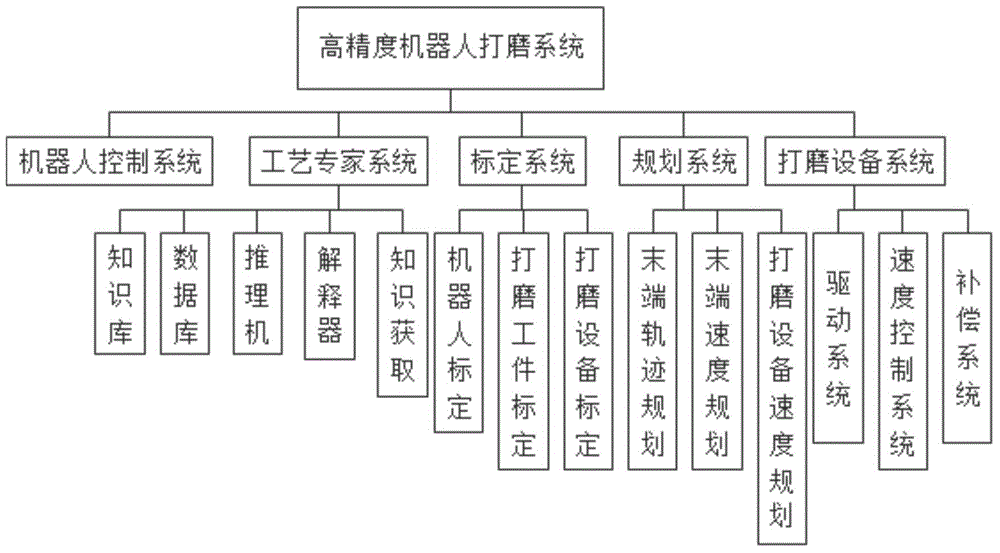
[0040] Figure one It is the composition diagram of the high-precision robot grinding system. By introducing an expert system, the system manages the various process parameters involved in the polishing process for database management, and can input and explain the user input through the human-computer interaction interface, and then perform data inference to obtain effective data output. For different types of workpieces, the grinding process parameters can be obtained reliably and with high quality, and then transmitted to the calibration and planning system. The calibration system consists of a robot calibration system, a workpiece calibration system, and a polishing equipment calibration system. Among them, the robot calibration system completes the calibration of robot kinematics parameters ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More