

Fault processing method for monocular vision navigation feature point losing
A fault handling method and visual navigation technology, which is applied in the field of visual relative navigation, can solve problems such as insufficient number of feature points, large number of feature point extractions, and failure of the system to perform normal navigation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
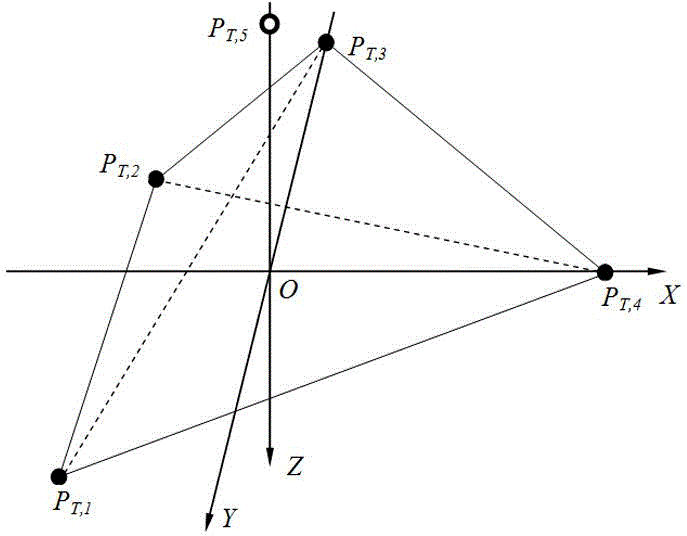
[0027] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0028] In the present invention, in order to improve the contrast between the feature point target of the visual navigation system and the surrounding environment, and avoid the impact of changes in ambient light conditions on image recognition, the present invention uses infrared LEDs as the feature point target, and its spatial configuration is as follows figure 1 shown. where P T,1 , P T,2 , P T,3 , P T,4 In the same plane, called in-plane feature points, P T,5 at P T,1 P T,2 P T,3 P T,4 Out of the plane formed, called out-of-plane feature points. The feature points in the same plane form 4 triangles, and their areas from large to small are: ΔP T,1 P T,3 P T,4 , ΔP T,1 P T,2 P T,4 , ΔP T,2 P T,3 P T,4 and ΔP T,1 P T,2 P T,3 . The characteristic of this feature point system is that the areas of the above four triangle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More