Finite time stability control system with speed observer based on PC+FPGA
A stability control and limited time technology, applied in general control system, control/regulation system, program control, etc., can solve the problem of low performance of independent servo PID control and achieve the effect of precise tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. And the features in the embodiments can be combined with each other.
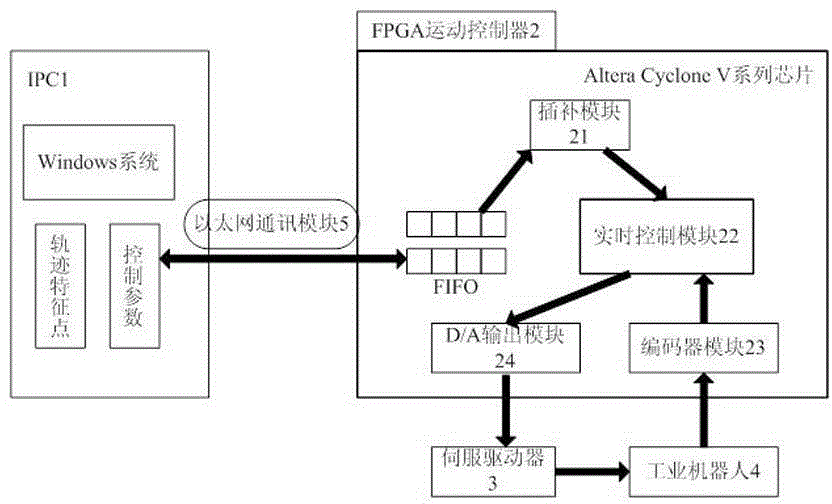
[0035] The hardware structure of the system of the present invention is as figure 1As shown, the main logic control device of the present invention is an FPGA core control chip, and the main algorithm is a finite-time stability control method and a finite-time convergent speed observer algorithm. The two are combined with software and hardware to jointly complete high-performance motion control functions. Finite-time stability control system with speed observer based on PC+FPGA, including IPC1, FPGA motion controller 2, servo driver 3, industrial robot 4, Ethernet communication module 5, FPGA motion controller 2 including interpolation module 21 , real-t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More