

Flexible tool control system based on Ether CAT and CAN buses
A CAN bus, flexible tooling technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of inconvenient operation, unstable transmission, difficult to achieve, etc., to improve the data transmission rate and operability. , Reasonable design effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
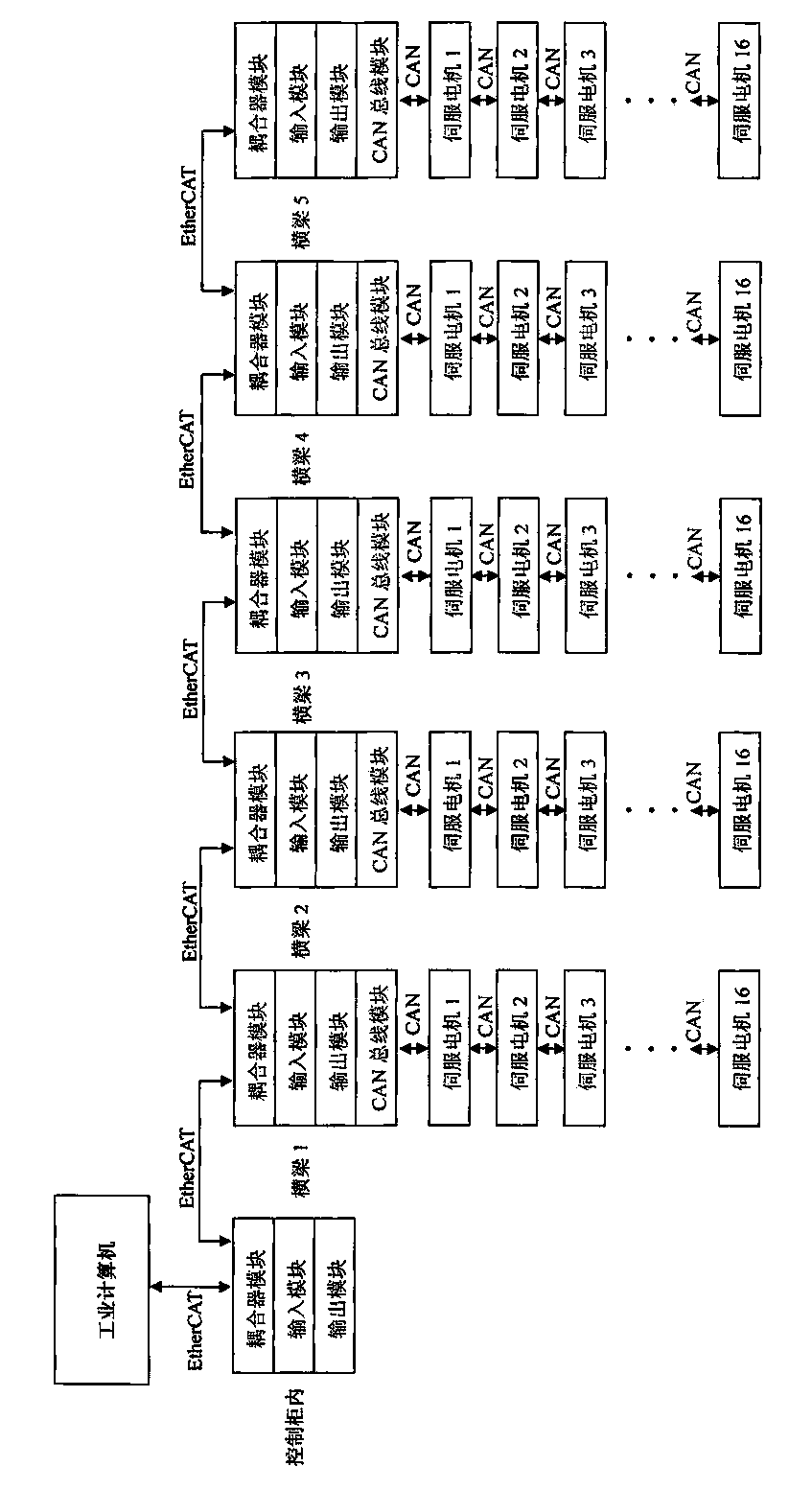
[0011] The patent of the present invention will be further described below in conjunction with specific embodiments, see the attached figure 1 . The system consists of an industrial computer, modules located in the control cabinet, 5 substation modules distributed on the moving beam, servo motors and corresponding power supplies and protection circuits. EtherCAT bus communication is used between the industrial computer and the coupler module in the control cabinet, between the coupler module in the control cabinet and the coupler module on beam 1, and between the coupler modules from beam 1 to beam 5 respectively. And the CAN bus module on the beam 1 and the servo motor 1 on the beam, and the servo motor 1 to the servo motor 16 communicate with each other through the CAN bus, and the CAN bus module on the beam 2 to the beam 5 and the servo motor and the servo motor All communicate with CAN bus. Each part is described below:
[0012] The industrial computer is the control co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More