

Self-regulating error symbol integration robust control method for direct-drive motor system
A technology of direct drive motor and error sign, which is applied in the field of self-adjusting error sign integral robust control of direct drive motor system, can solve problems such as sliding mode surface flutter, difficult time acquisition, and deterioration of system tracking performance, so as to solve random performance, good tracking performance, and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0100] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the direct drive motor system:
[0101] Inertia load parameter m=0.02kg·m 2 ; Viscous friction coefficient B = 10N m s / rad; torque amplification factor k i =5N·m / V;
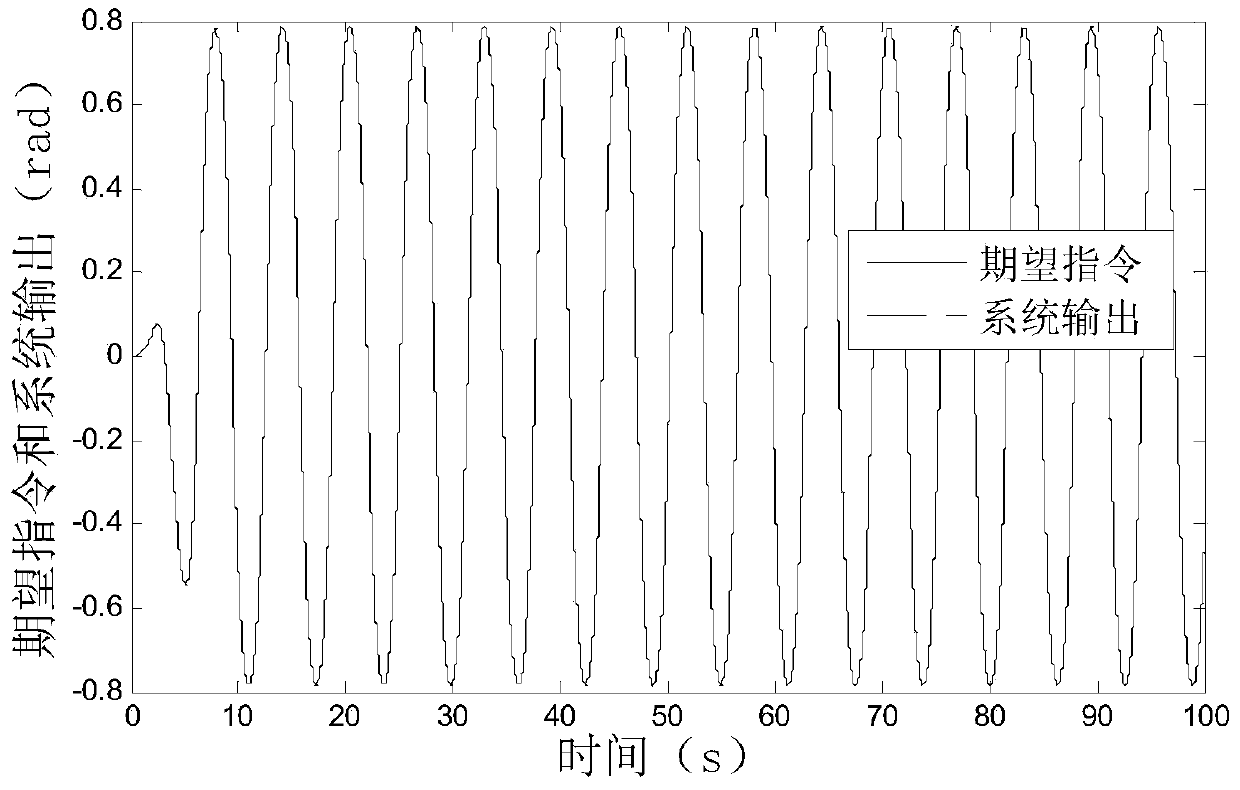
[0102] The desired instruction for a given system is x 1d =sin(t)[1-exp(-0.01t 3 )] (rad).
[0103] According to two different system working conditions, the simulation process is divided into two parts:
[0104] ①When the time-varying interference f(t)=10sint(N·m)
[0105] Take the following controller for comparison:
[0106] Self-regulating error sign integral robust (ARISE) controller: take the controller parameter k 1 =10,k 2 = 1,k r = 1; The self-regulating law gain Γ=50.
[0107] PID controller: The selection steps of PID controller parameters are as follows: first, under the condition of ignoring the nonlinear dynamics of the direct drive motor system, a set of co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More