

Robot arm device
A robot arm and finger technology, applied in the field of robotics, can solve problems such as increased complexity, small work space, and poor attitude ability, and achieve the effects of facilitating relative kinematics analysis, large work space, and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
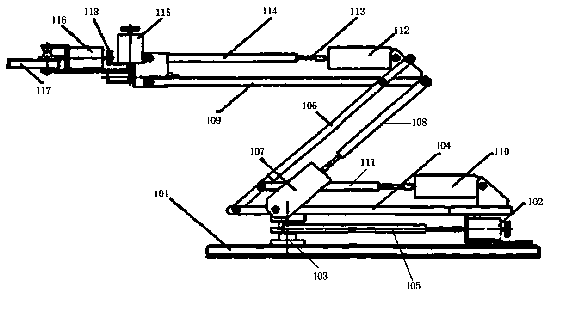
[0023] figure 1 A schematic structural diagram of a robot arm device according to an embodiment of the present invention is shown. Such as figure 1 The shown robot arm device includes a base 101, on which a lumbar joint driving motor 102 and a supporting part 103 are arranged, and a body 104 is arranged on the supporting part 103, and the lumbar joint driving motor 102 passes through the first A piston rod 105 is connected with the support part 103, and one end of the body 104 is rotatably connected with a big arm 106; the support part 103 is rotatably connected with an elbow joint driving motor 107, and the elbow joint driving motor 107 is driven by the second piston. The rod 108 is rotationally connected with the forearm 109; the other end of the body 104 is provided with a shoulder joint drive motor 110, the shoulder joint drive motor 110 is rotationally connected with the body 104, and the shoulder joint drive motor 110 is connected with the third piston rod 111 The big ...
Embodiment 2
[0030] The performance parameters of the robot arm device include the opening angle of the fingers, the rotation angle and bending angle of the wrist joint, the swing angle of the upper arm along the shoulder, and the upper and lower swing angle of the forearm along the upper arm. These joints are determined by the mechanical structure and physical properties of the multi-DOF robotic arm device. The maximum joint angle determines the flexibility and working ability of the multi-degree-of-freedom robotic arm device, which can open or rotate or swing.
[0031] Each joint part of the robot arm assembly can rotate or swing between zero degrees and a maximum angle.
[0032] Among them, the waist joint can realize the rotation of all mechanisms of the robot arm device except the base; the shoulder joint can make the upper arm, forearm and fingers swing as a whole; the elbow joint can make the forearm and fingers swing; the wrist joint can rotate and swing, and the fingers Can grab ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More