

Mechanical arm positioning fetching method based on machine vision
A technology of machine vision and robotic arm, applied in the field of robotic arm, can solve the problems of high cost and poor real-time performance, and achieve the effect of improving accuracy, fast and flexible grasping, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The above and other technical features and advantages of the present invention will be further described below in conjunction with the accompanying drawings.
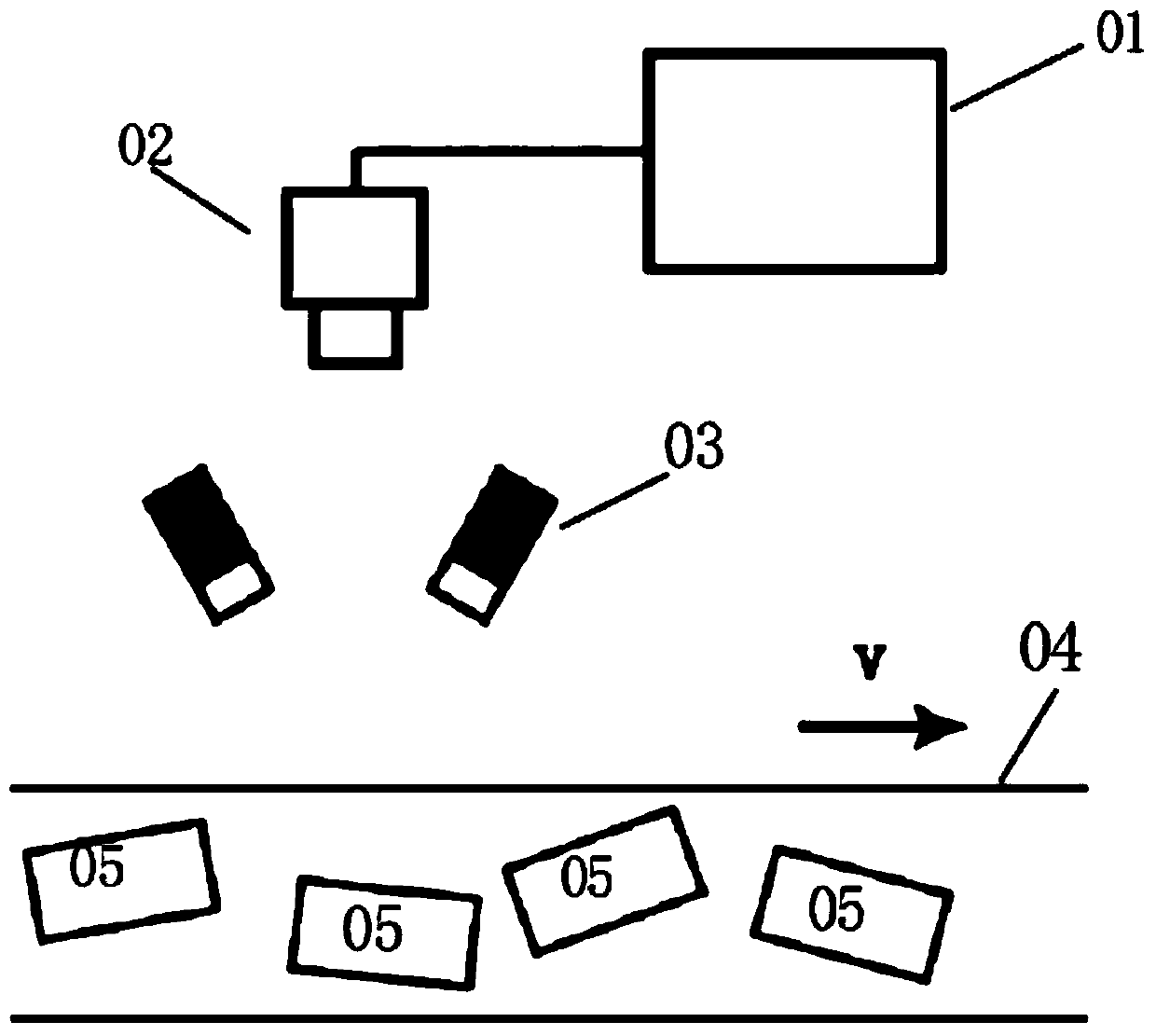
[0051] see figure 2 , is a schematic diagram of the position among the camera 02 , the conveyor belt 04 and the workpiece 05 in the present invention. The present invention connects the camera 02 and the mechanical arm (not shown in the figure) through the computer 01 to carry out information transmission and control. The present invention may include a plurality of mechanical arms, which are arranged beside the conveyor belt at certain intervals, and grasp the workpieces 05 scattered on the conveyor belt 04 under the control of the computer 01 . One of the advantages of the present invention is that only one camera 02 needs to be installed above the conveyor belt 04 , instead of having to equip each mechanical arm with a camera as in the prior art, which greatly reduces the production cost and facilitates larg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More