Fast-growing wood pruning and maintaining robot and control method thereof
A technology of robots and fast-growing forests, applied in gardening methods, electric pruning saws, program-controlled manipulators, etc., can solve the problems of insufficient pruning height, high labor intensity, poor safety, etc., and reduce the residual amount of branches , high degree of automation and high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
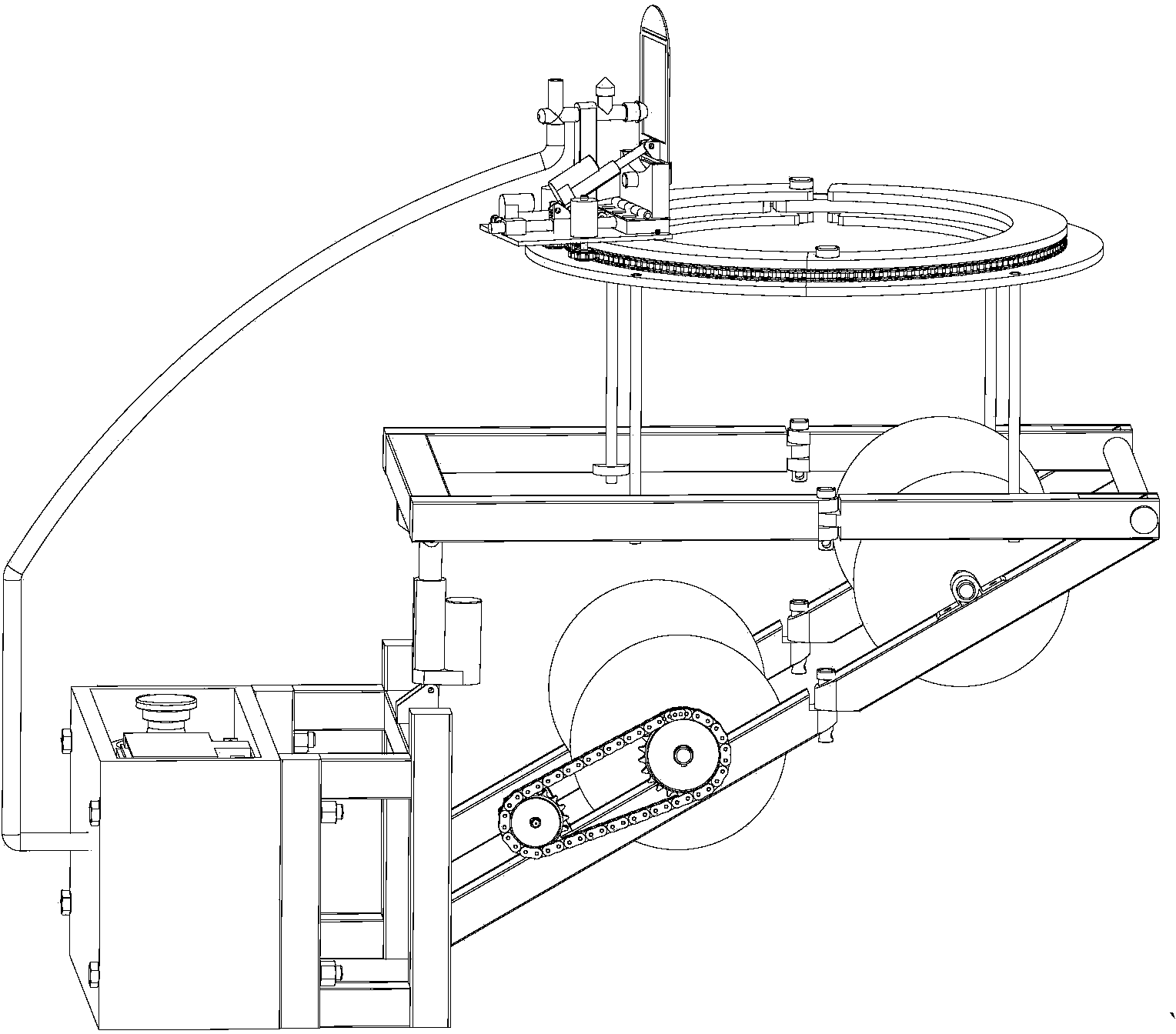
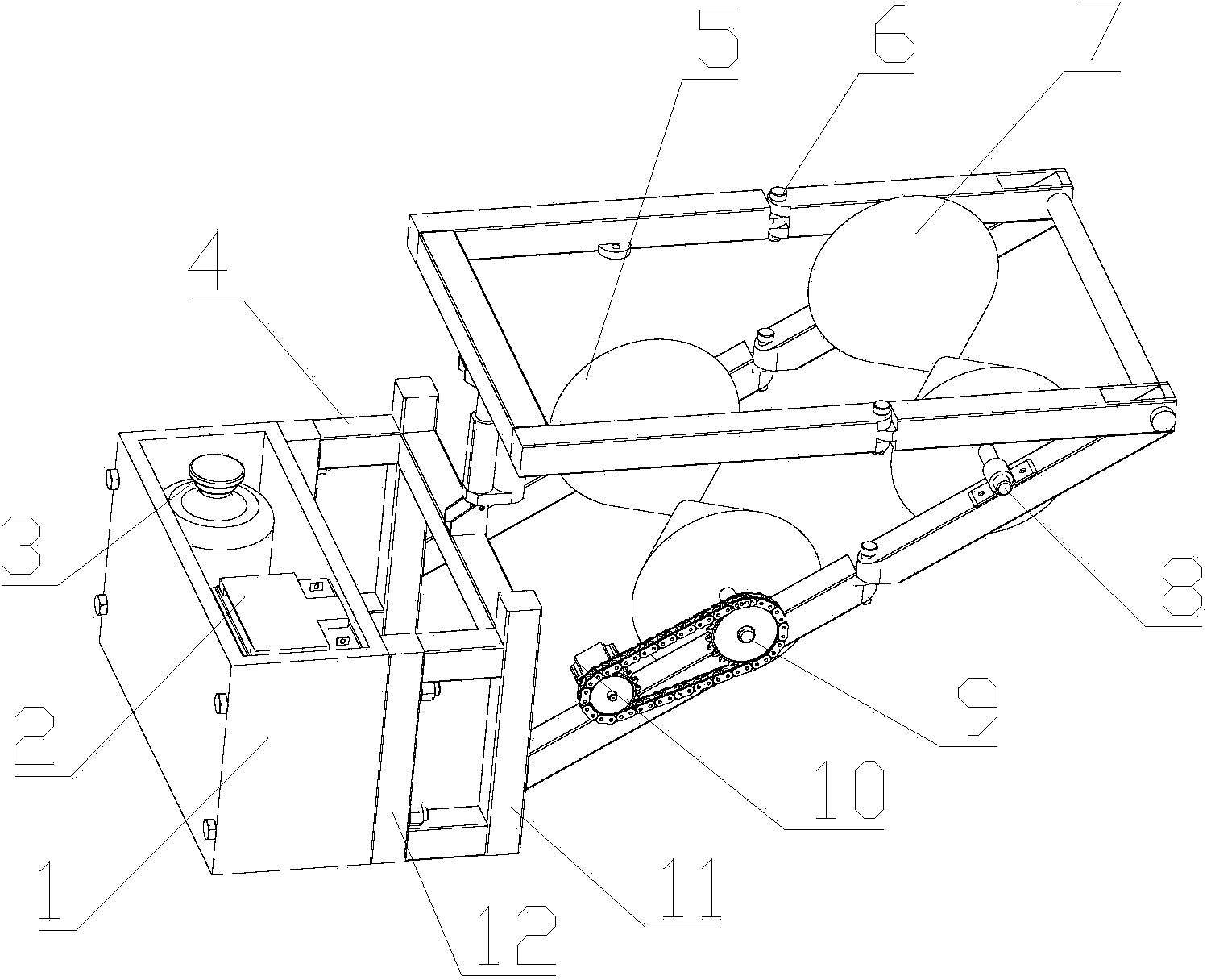
[0041] Below in conjunction with accompanying drawing, the patent of the present invention is further described. A fast-growing forest pruning maintenance robot and control method described in the present invention, such as figure 1 , 2 , 3, the counterweight box (1) is fixed on the counterweight box bracket (12) by fastening bolts, and is used to place the medicine box (3) and the storage battery (2), and the medicine box (3) is used to store medicine The battery (2) provides power for the machine; the counterweight box support (12) is fixedly connected with the mechanical support of the climbing mechanism through the connecting rod (4).
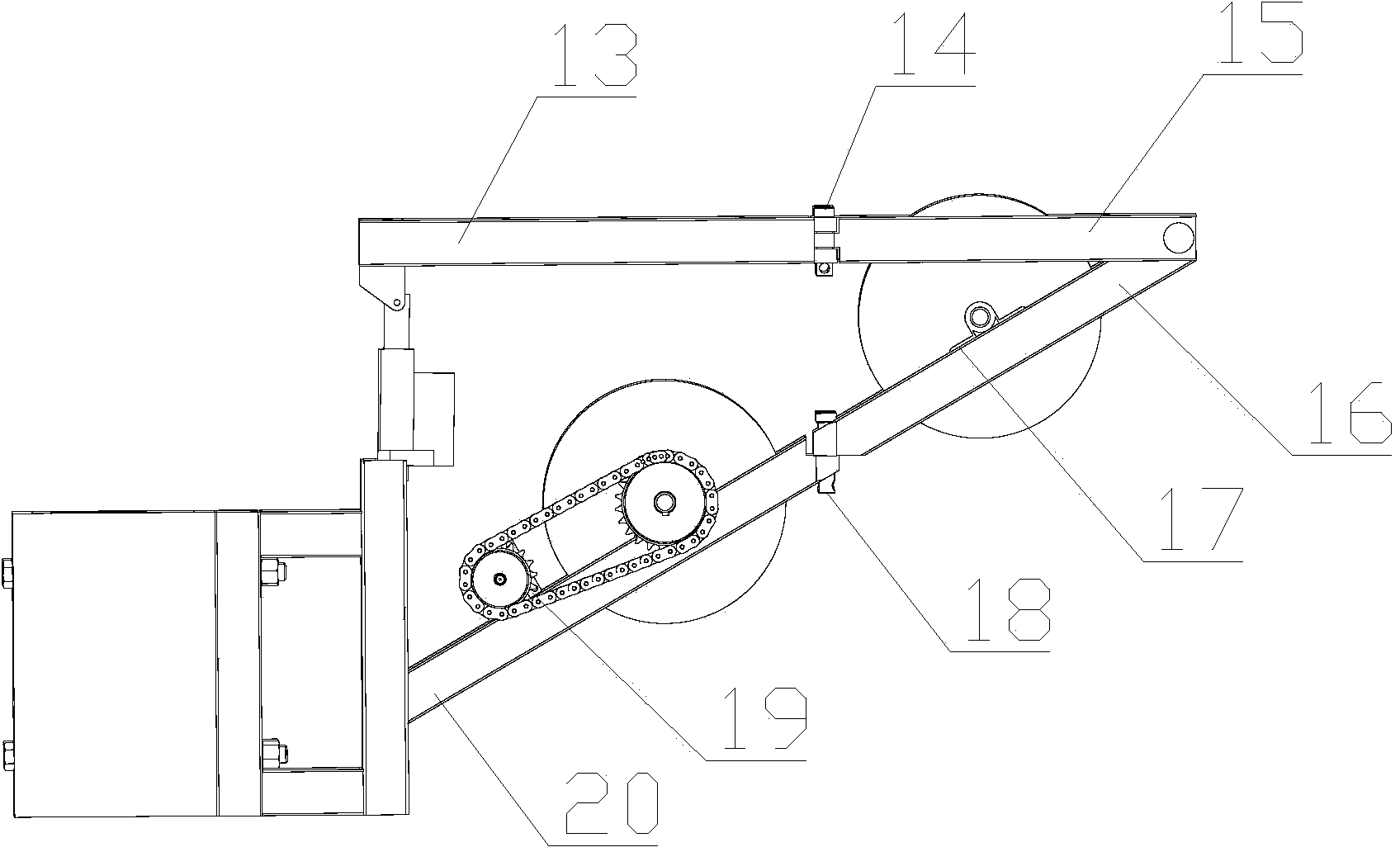
[0042] Such as figure 1 , 2 , 3, and 4, the climbing mechanism includes a mechanical support, a drive shaft (9), a drive wheel (5), a seat bearing (17), a drive motor (10), a motor seat (19), a drive chain Wheel, support shaft (8) and support wheel (7). Described mechanical support is the support skeleton of climbing mechanism, compris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More