

Swing-arm type manipulator
A manipulator and arm-type technology, applied in the field of control engineering and automation, can solve the problems of inflexible movement and grasping, affecting the work efficiency of the manipulator, and easily limited degrees of freedom, so as to reduce the defect rate, increase production capacity, and reduce labor costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of the present invention.
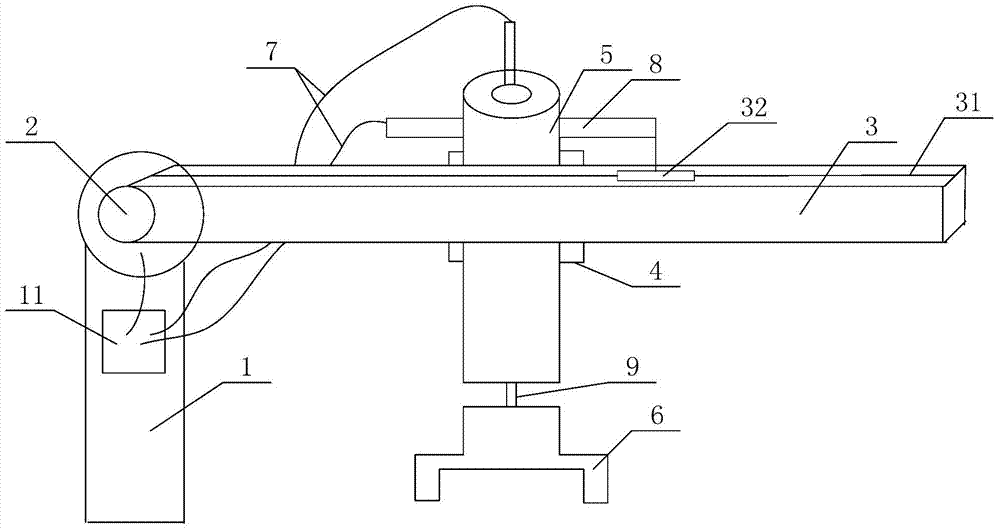
[0021] like figure 1 As shown, the rotating arm manipulator of the present invention includes a base 1, a transverse arm 3 whose end is fixed on the base 1 through a rotating shaft 2 and is arranged horizontally, and the transverse arm 3 can rotate 360 degrees in the horizontal plane around the rotating shaft 2, and slides A sliding seat 4 connected to the cross arm 3 and slidable along its length direction, a lifting and lowering mechanical arm 5 fixed on the slidi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More