

Water area surveillance robot for collecting water area information and control method thereof
A technology for information collection and robotics, applied in motor vehicles, special-purpose ships, propulsion components, etc., can solve the problems of difficult operation, high cost and power consumption, insufficient stability and robustness of ordinary hulls, and achieve the investment of manpower and material resources. Low cost, low equipment cost, simple and easy structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
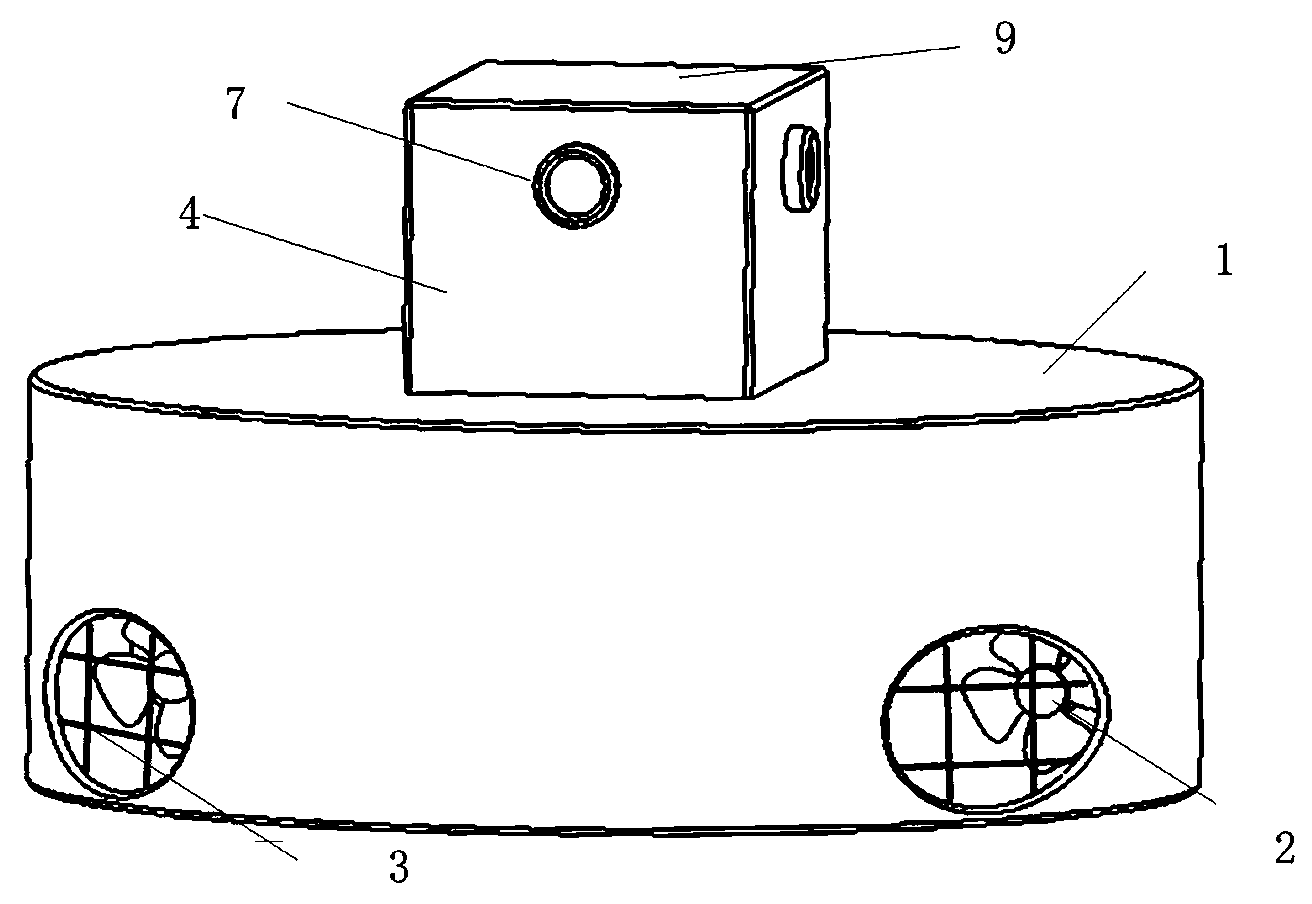
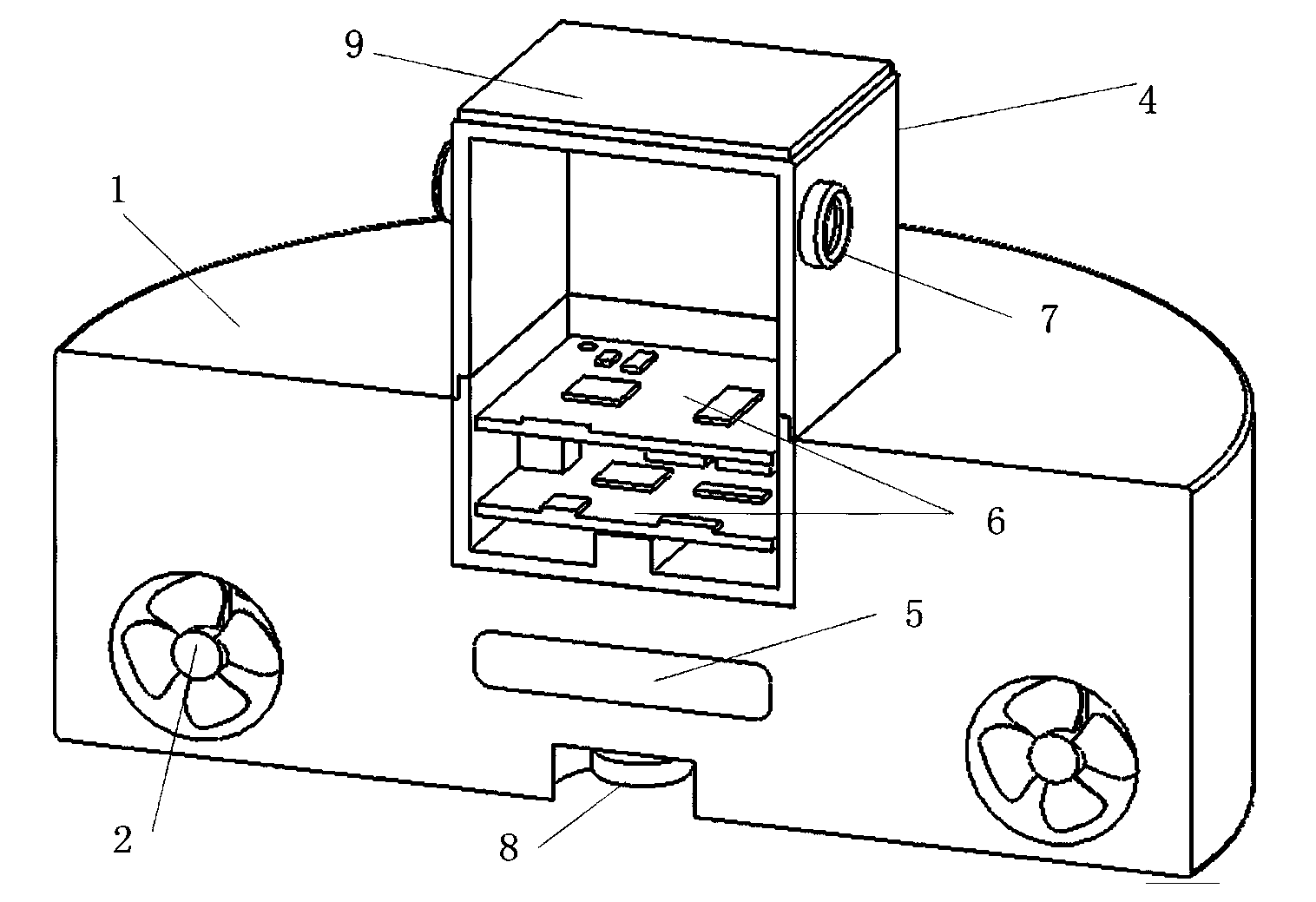
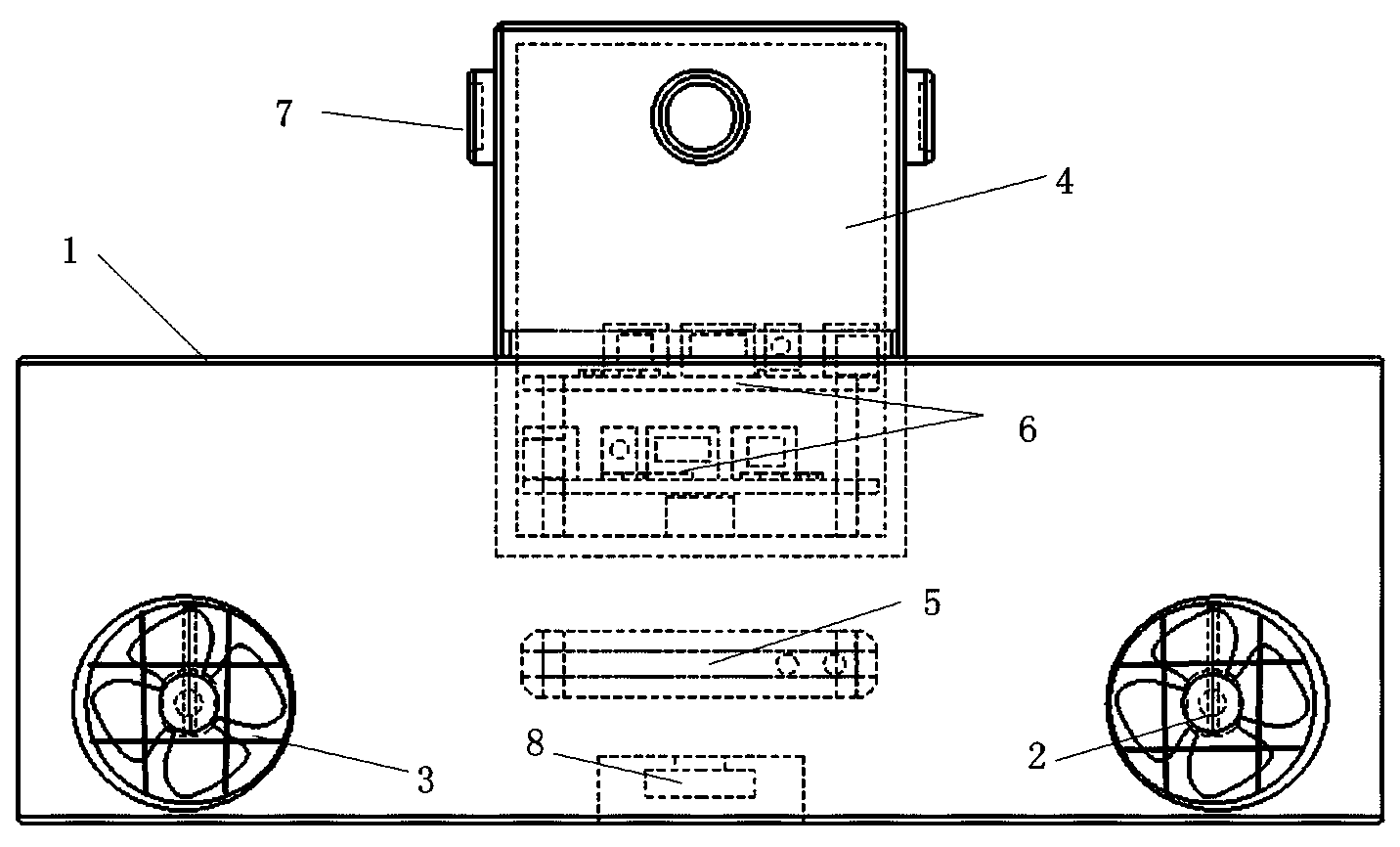
[0025] A water area reconnaissance robot for water area information collection, including a hull and a drive unit installed on the hull, a main control unit, a water area information collection unit, an energy supply unit, and a wireless communication unit. The main control unit is respectively connected to the water area information collection unit, Wireless communication unit and energy supply unit; the hull adopts a cylindrical hull structure, the hull diameter is 300-500mm, the thickness of the cylindrical hull is 200-250mm, the draft is 150-200mm, the bottom of the hull is made of hard materials; the outer side of the hull It is an elastic material such as rubber, and the interior of the hull is filled with light and dense foam; the drive unit is two ducted propellers that run through the hull, and the two ducted propellers are symmetrically installed on both sides of the hull. The distance from the center of the ducted propeller to the lower surface of the hull is 50~60mm...
Embodiment 2
[0028]A control method for a water area reconnaissance robot used for collecting water area information. The water area reconnaissance robot relies on water flow to advance. When the water area reconnaissance robot enters a dead water area, the drive motor of the duct propeller is started, and the electronic compass module and the guidance of the water area information Control the hull to achieve attitude adjustment and get out of the dead water area; when continuous information collection is required in designated waters, start the drive motor to push the robot against the current direction, thereby slowing down the speed of the robot to increase the information collection time in designated waters; When going to the designated water area to collect information, start the drive motor to push the robot along the direction of the water flow, so that the robot can accelerate to the target water area.
[0029] The water area reconnaissance robot adjusts the horizontal direction of...
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More