

Method for positioning region of interest
A technology of region of interest and positioning method, which is applied in the field of image processing and pattern recognition, can solve the problems of insufficient original image features, interference of irradiation angle, and difficult recognition, etc., and achieves extremely easy detection and recognition, strong robustness, Solve the effect that the category is difficult to distinguish
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
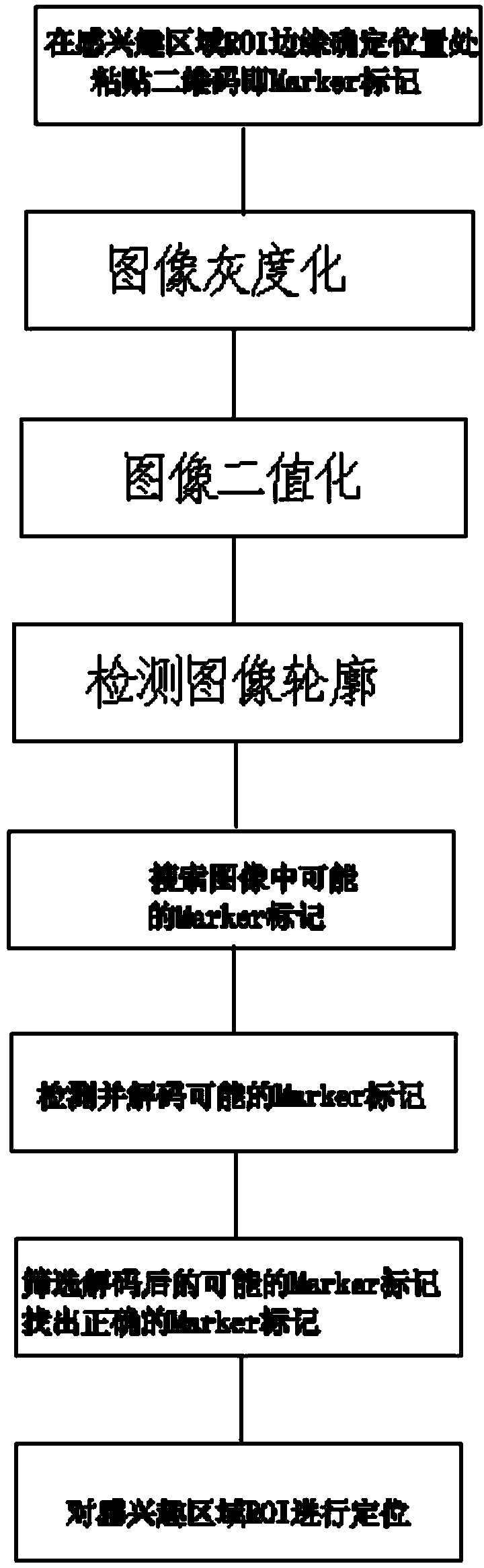
[0052] A method for locating a region of interest, the specific steps comprising:
[0053] A. Paste a two-dimensional code, that is, a Marker, at a certain position on the edge of the region of interest ROI; the determined position means that the region of interest ROI can be located by the size and position of the Marker mark through a scale or other measuring tools;
[0054] B. Detect the Marker mark and locate the ROI region of interest. The specific steps are as follows:
[0055] (1) Image grayscale;
[0056] (2) Image binarization;
[0057] (3) Detect image contour;
[0058] (4) search for possible Marker marks in the image;
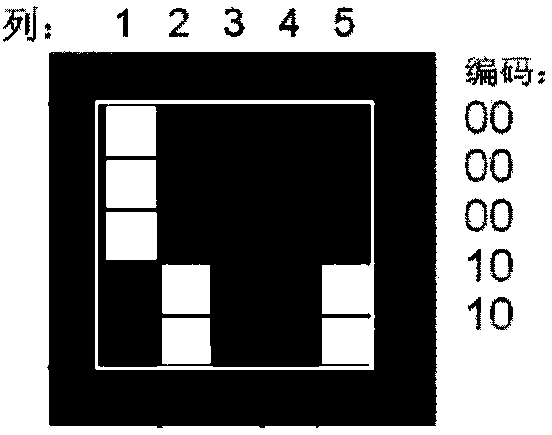
[0059] (5) Detect and decode possible Marker marks;
[0060] (6) screen the possible Marker marks after decoding to find out the correct Marker mark;
[0061] (7) Position the region of interest ROI, and complete the positioning of the region of interest ROI according to the determined position of the Marker and the region of interest ROI;
[...
Embodiment 2
[0069] According to a method for locating a region of interest described in Embodiment 1, the difference is that the detection of image contours specifically refers to using the findContours() function in the opencv library to obtain a series of polygonal contours from the image.
Embodiment 3
[0071] According to the positioning method of a region of interest described in Embodiment 1, the difference is that the possible Marker marks in the search image specifically refer to obtaining from the polygon outline through the findMarkerCandidates() method in the MarkerDetector class For possible Marker marks, use the approxPolyDP() function to filter out a convex polygon with 4 vertices from the polygon outline, and detect the side length of the convex polygon. If the minimum side length of the convex polygon is less than 10pixel, it is not considered to be A possible Marker, otherwise, it is considered a possible Marker.
[0072] Only a convex polygon with 4 vertices may be a Marker.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More