

Novel series-parallel mechanical hand for minimally invasive operation
A minimally invasive surgery and manipulator technology, applied in the field of robotics, can solve the problems of cumbersome control, complex structure, and high cost, and achieve the effects of improving surgical accuracy, high safety, and reducing injuries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
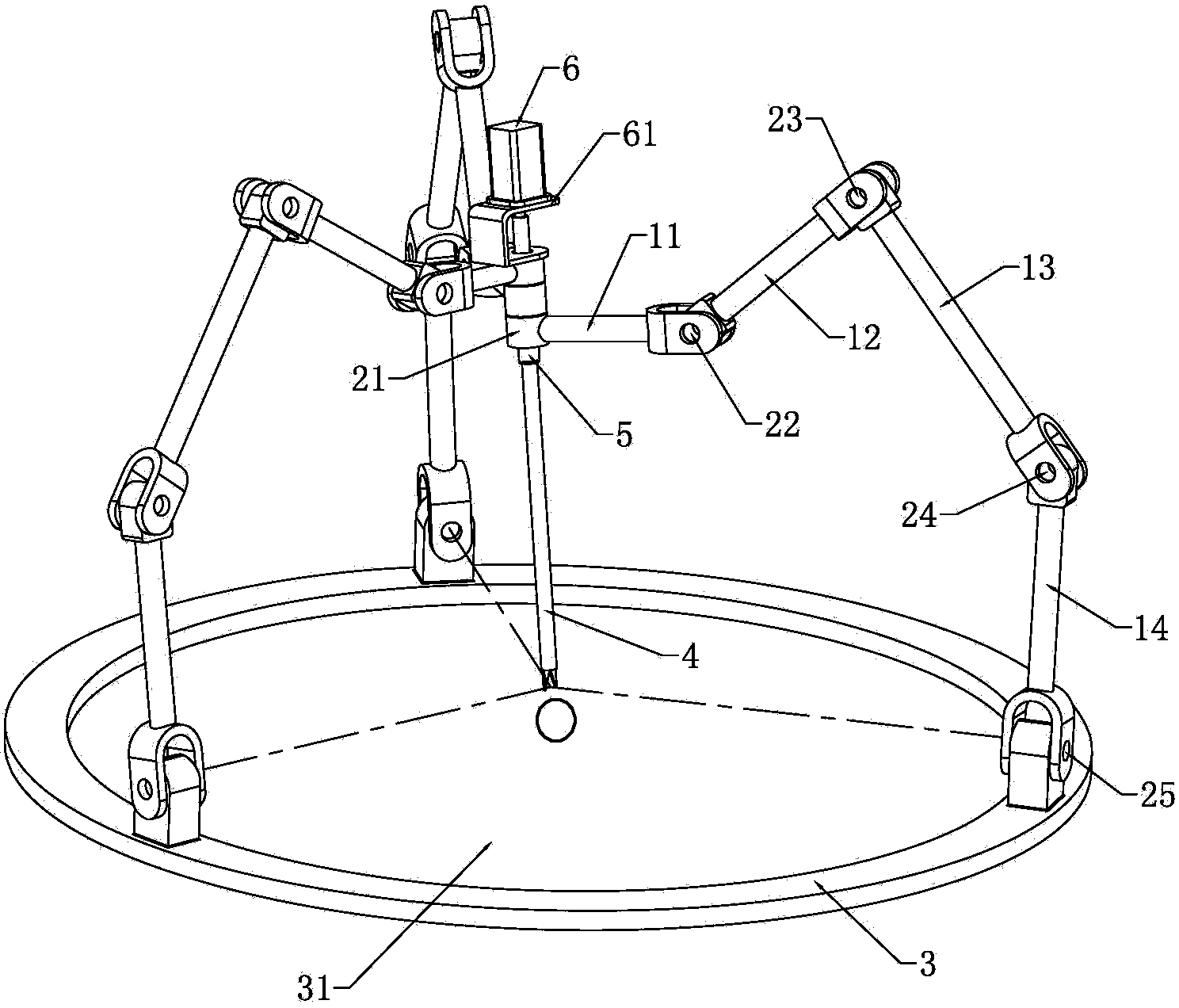
[0020] Such as figure 1 As shown, a new hybrid manipulator for minimally invasive surgery, including a circular base 3, a surgical module and three branches.
[0021] The surgical module is positioned above the base and includes a surgical tool 4 and a motor 6 for driving the surgical tool to rotate; the surgical tool is generally a laparoscopic instrument (specifically refers to an incision knife, separating forceps, irrigator, and endoscope) , and the lower end of the surgical tool goes down through the middle cavity 31 of the base and then extends under the base.
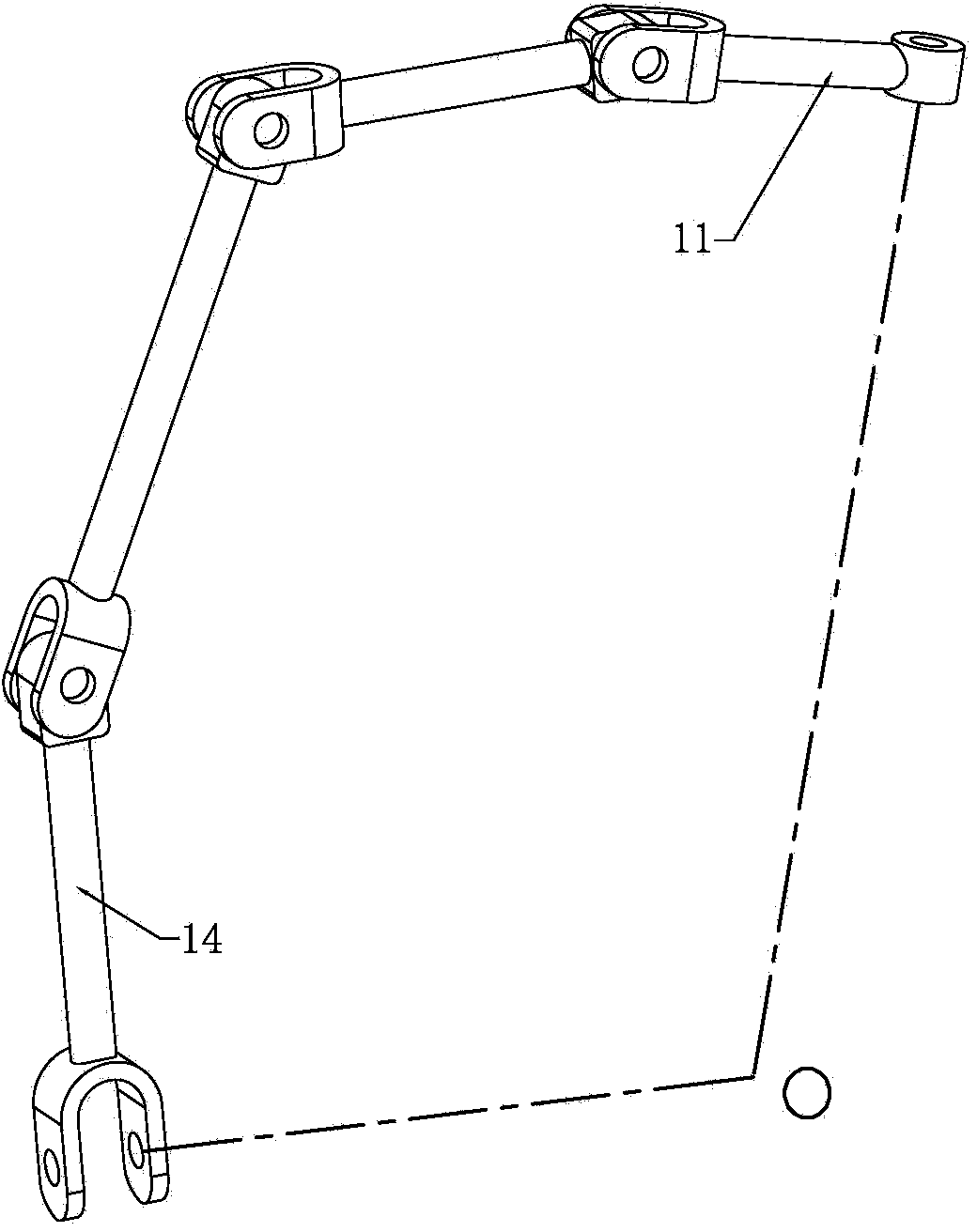
[0022] The three branches are connected in parallel between the base and the surgical module, and can be used to drive the movement of the surgical module; each branch is a five-degree-of-freedom mechanical arm, including a robot arm that is sequentially connected between the surgical module and the base from top to bottom. The first turning pair 21, the first connecting rod 11, the second turning pair 22, the s...
Embodiment 2
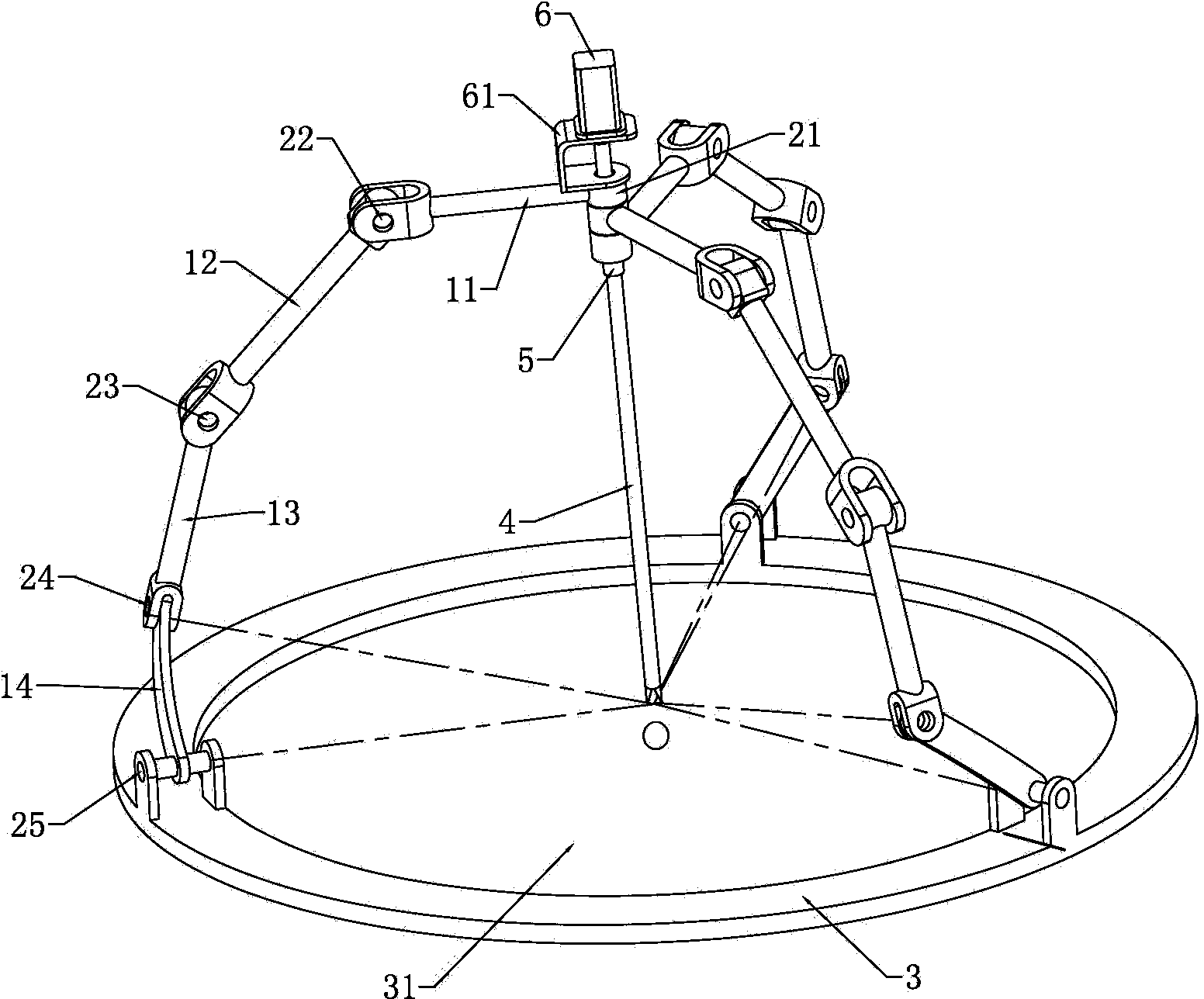
[0028] Such as image 3 As shown, a new hybrid manipulator for minimally invasive surgery, including a circular base 3, a surgical module and three branches.
[0029] The surgical module is positioned above the base and includes a surgical tool 4 and a motor 6 for driving the surgical tool to rotate; the surgical tool is generally a laparoscopic instrument, and the lower end of the surgical tool extends downward through the middle cavity 31 of the base into the bottom of the base.
[0030] The three branches are connected in parallel between the base and the surgical module, and can be used to drive the movement of the surgical module; each branch is a five-degree-of-freedom mechanical arm, including a robot arm that is sequentially connected between the surgical module and the base from top to bottom. The first turning pair 21, the first connecting rod 11, the second turning pair 22, the second connecting rod 12, the third turning pair 23, the third connecting rod 13, the fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More