

Weighing-sensor-free starting torque control method of elevator permanent magnet dragging system
A weighing sensor and traction system technology, which is applied in the field of motor and elevator traction control, can solve the problems of reduced reliability and increased cost of the elevator system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
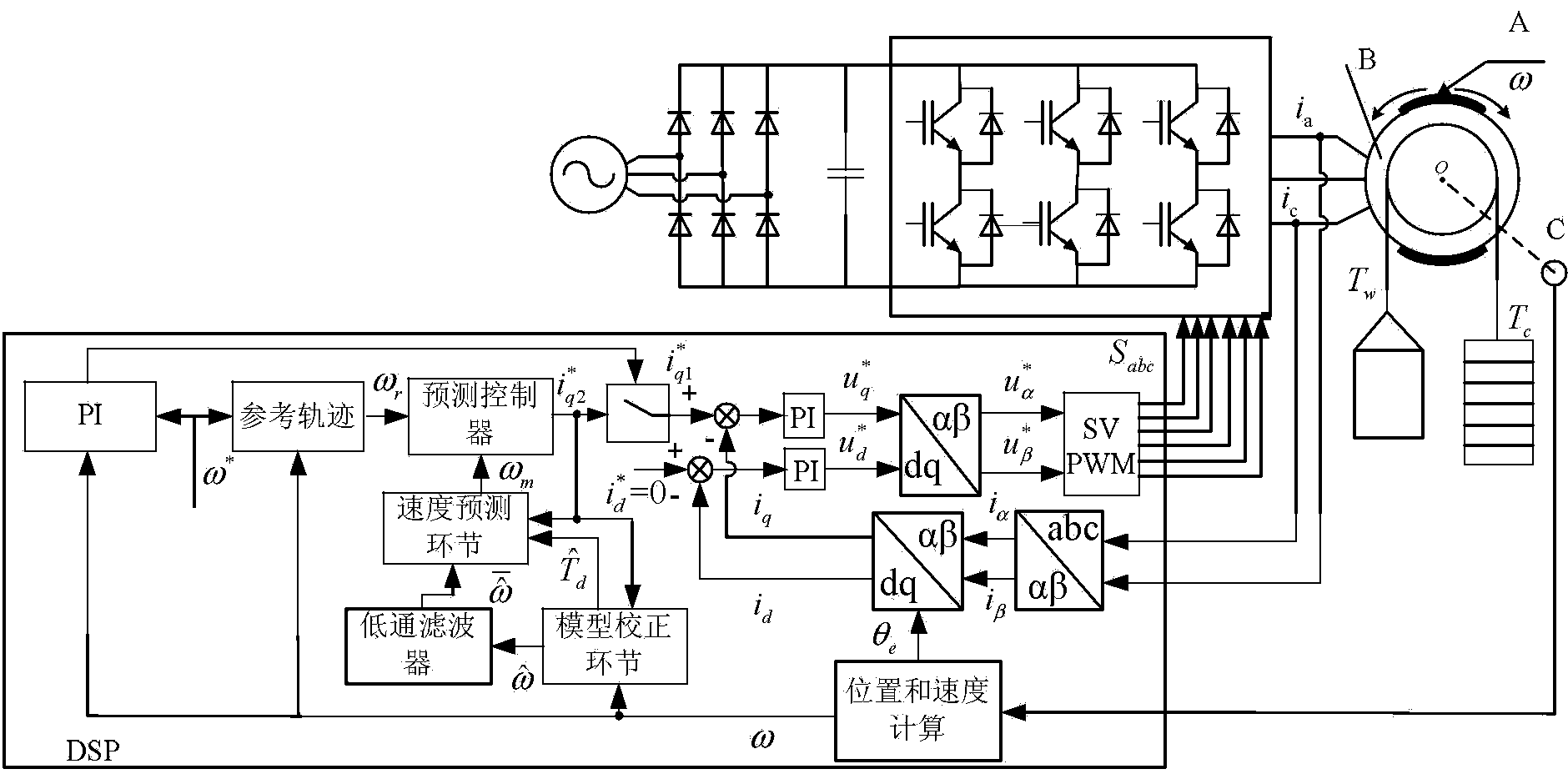
[0084] Specific implementation mode one: the following combination figure 1 and figure 2 This embodiment will be described. The elevator permanent magnet traction system described in this embodiment does not have a weighing sensor starting torque control method. The permanent magnet traction system uses a permanent magnet synchronous motor as the traction machine. The permanent magnet synchronous motor adopts a Quantitative photoelectric encoder is used as position sensor, it is characterized in that, it comprises the following steps:
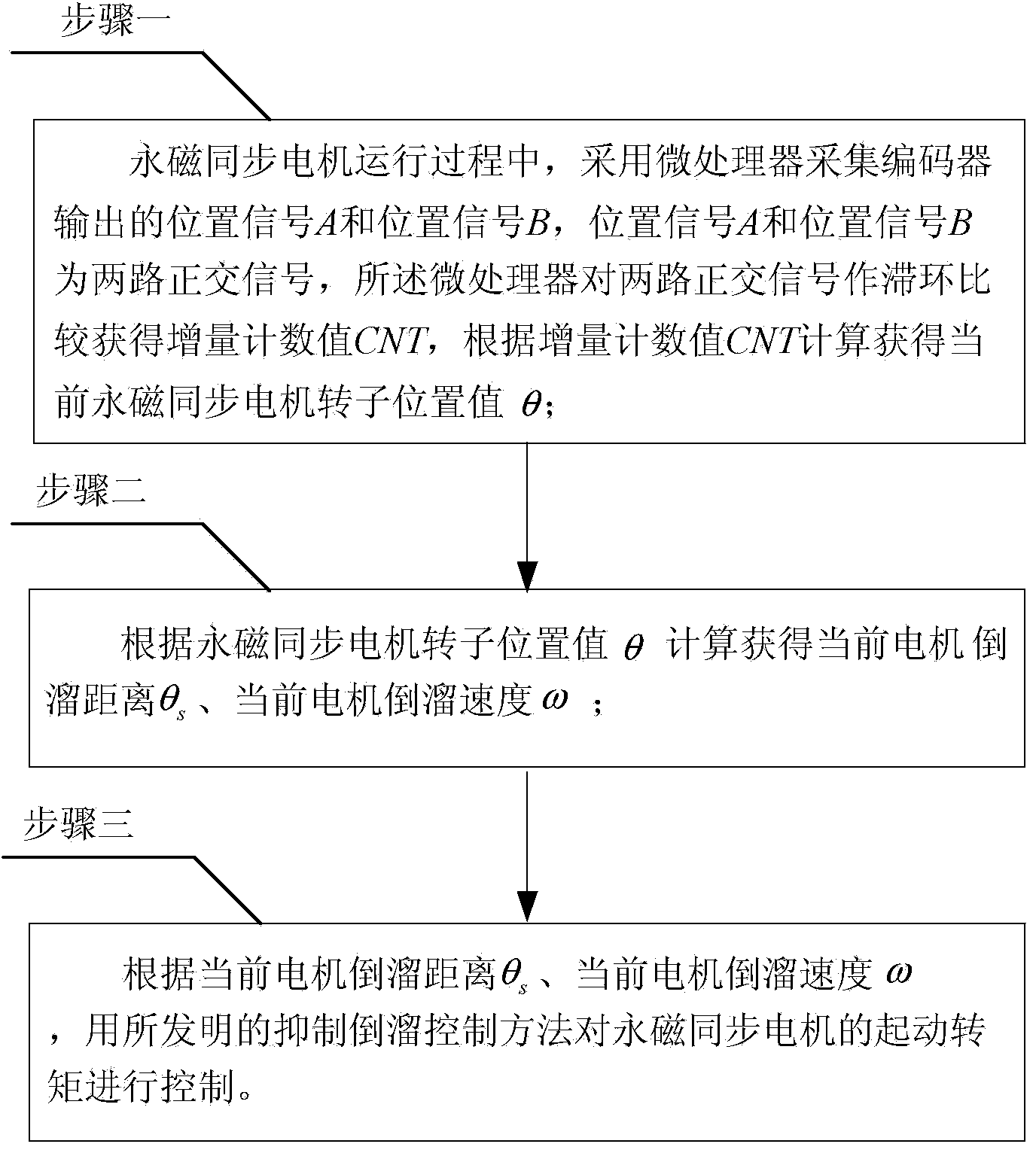
[0085] Step 1: During the operation of the permanent magnet synchronous motor, the microprocessor is used to collect the position signal A and the position signal B output by the incremental photoelectric encoder. The position signal A and the position signal B are two orthogonal signals. The two-way quadrature signal is used for hysteresis comparison to obtain the incremental count value CNT, and then calculated according to the incremental ...
specific Embodiment approach 2
[0089] Specific implementation mode 2: This implementation mode further explains the implementation mode 1. The method for obtaining the current permanent magnet synchronous motor rotor position value θ in step 1 is:
[0090] θ=2π·CNT / M; (1)
[0091] Among them, M is the number of quadrature signal pulses output by the incremental photoelectric encoder for one revolution.
specific Embodiment approach 3
[0092] Specific implementation mode three: this implementation mode further explains the second implementation mode, setting the current as the kth sampling period, then the current motor backsliding distance θ in step two s The method of obtaining is:
[0093] θ s = θ k -θ 1 ,
[0094] where θ k is the rotor position value of the permanent magnet synchronous motor calculated according to the signal sampled by the incremental photoelectric encoder at the kth sampling period; θ 1 is the rotor position value of the permanent magnet synchronous motor calculated according to the signal sampled by the incremental photoelectric encoder in the first sampling period; where k≥1;
[0095] In the kth sampling period, the method to obtain the current motor angular velocity ω is:
[0096] ω = θ k - θ k - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More