

Storage method and device for laser radar point cloud data
A technology of laser point cloud data and point cloud data, which is applied in image data processing, electrical digital data processing, special data processing applications, etc., can solve problems such as unfavorable data processing and point cloud disorder, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
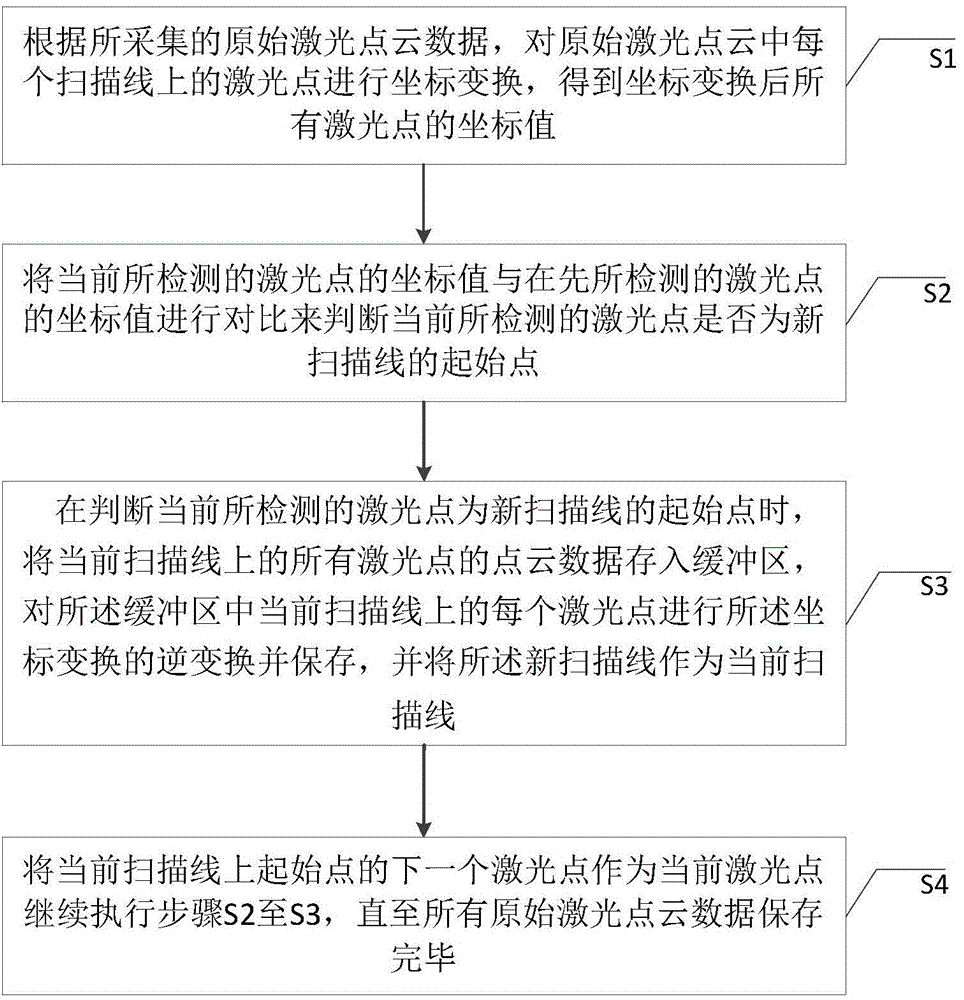
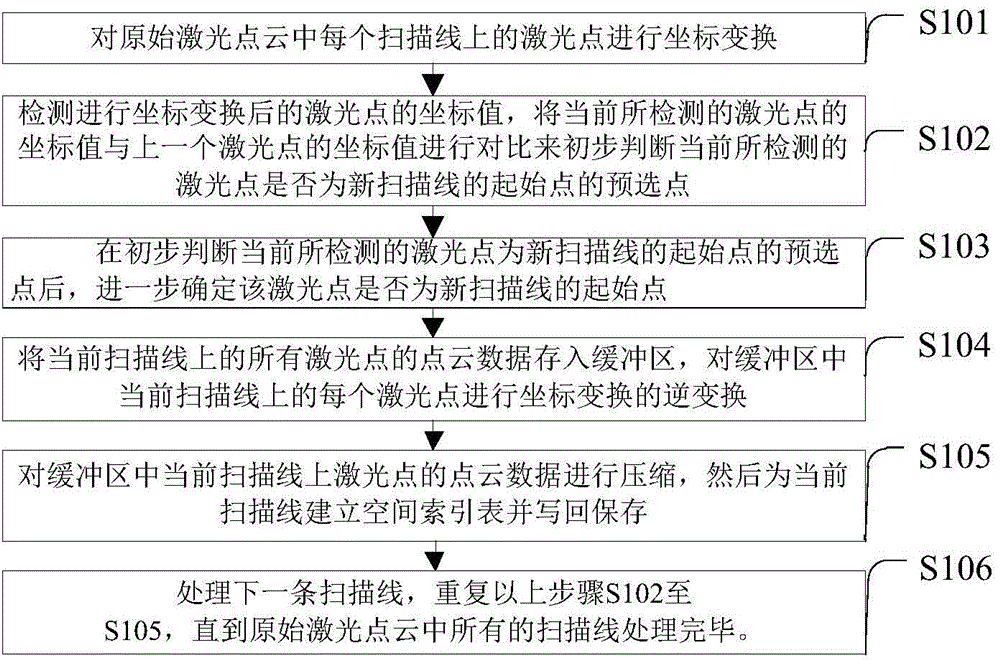
[0066] figure 2 It is a schematic flow chart of the storage method of laser radar point cloud data in this embodiment. The storage method is aimed at collecting the three-dimensional coordinate points of ground objects in a row-by-row or column-by-column scanning mode by the ground three-dimensional laser scanning system. These three-dimensional coordinates The points are spatially arranged in the form of a line scan point cloud, and the storage method includes the following steps:
[0067] Step S101 , according to the collected original laser point cloud data, perform coordinate transformation on the laser points on each scanning line in the original laser point cloud, and obtain the coordinate value of each laser point after the coordinate transformation.
[0068] In this embodiment, since the coordinates of the laser points on each scanning line in the collected original laser point cloud are three-dimensional rectangular coordinates (x, y, z), it is preferable to use the ...
Embodiment 2
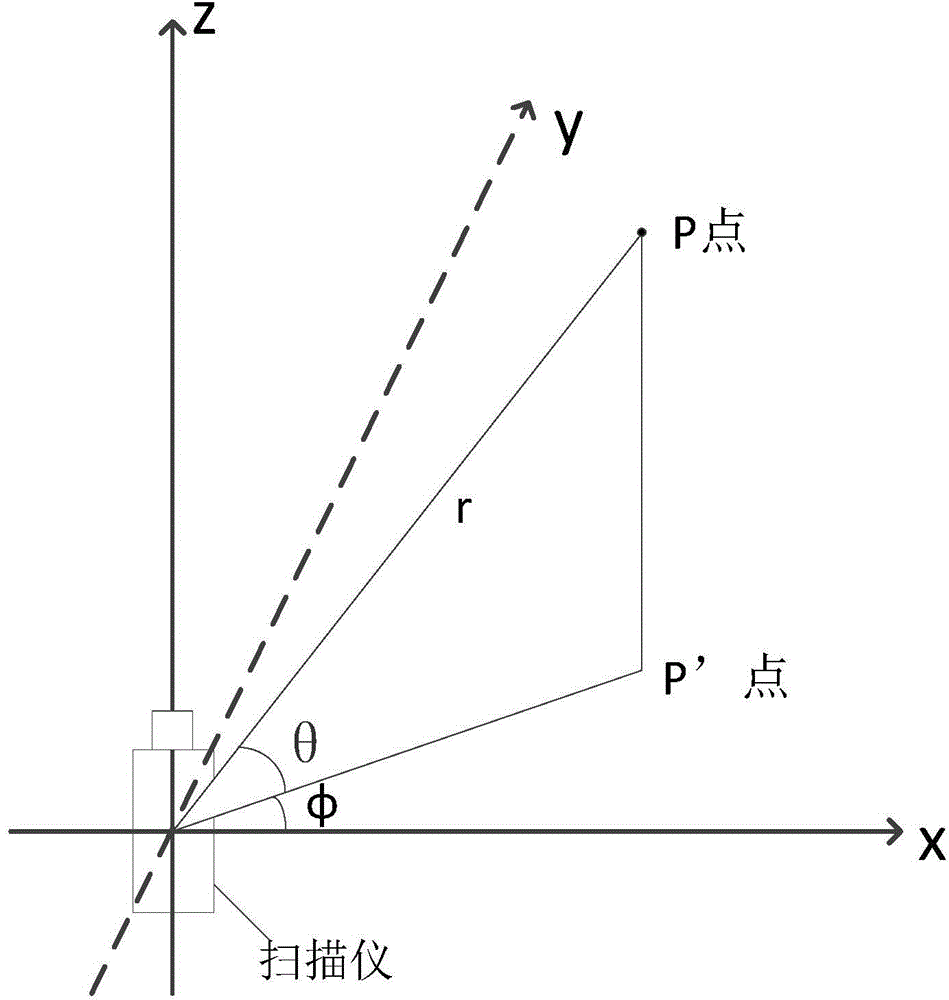
[0104] The embodiment of the present application also provides a storage device for lidar point cloud data, such as Figure 7 As shown, the storage device includes: a coordinate transformation unit 201 , a detection and judgment unit 202 , a cache unit 203 and a storage unit 204 . Wherein, the coordinate transformation unit 201 is configured to perform coordinate transformation on the laser points on each scanning line in the original laser point cloud according to the collected original laser point cloud data, and obtain coordinate values of all laser points after coordinate transformation. The coordinate transformation unit 201 also includes a coordinate transformation subunit 2011, which is used to convert the three-dimensional rectangular coordinates (x, y, z) of each laser point in the original laser point cloud data into three-dimensional laser scanning The spherical coordinates (r, θ, φ) of the center of the scanner, where r is the distance from the laser point to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More