

SINS/GPS integrated navigation based Kalman filter numerical optimization method
A Kalman Filter and Integrated Navigation Technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
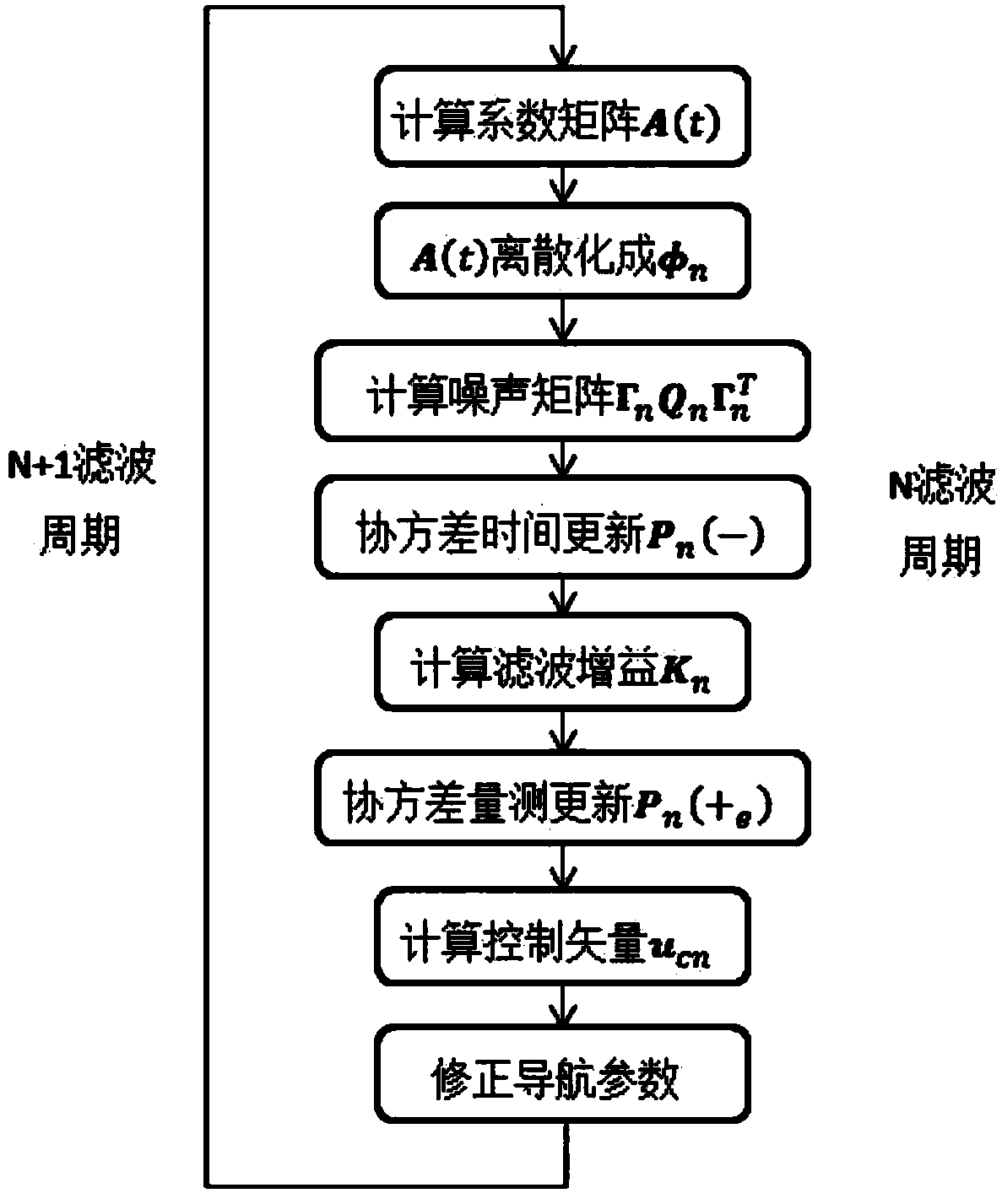
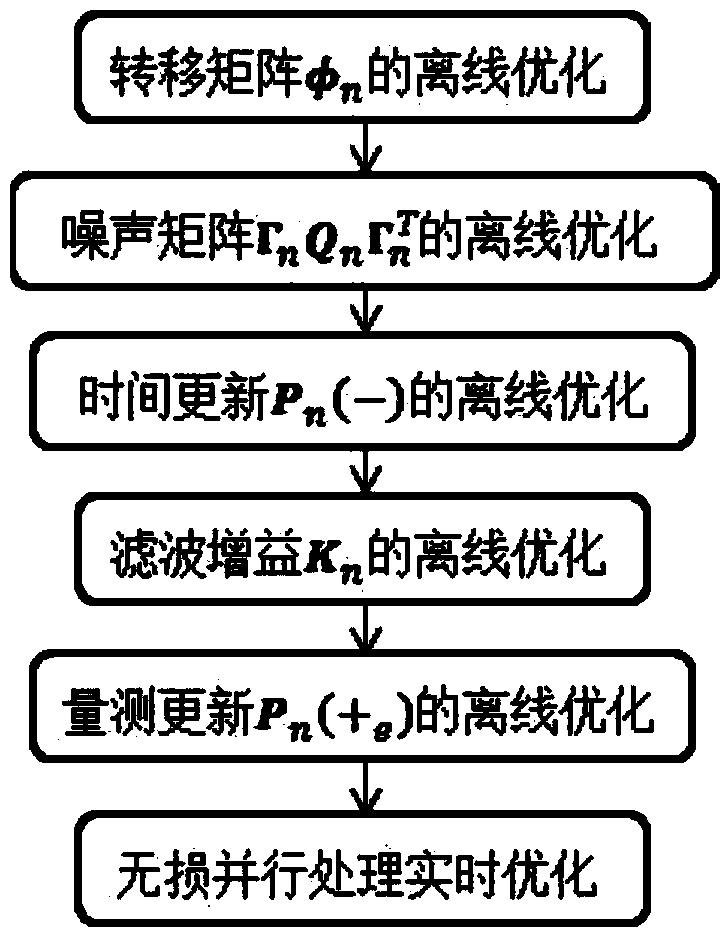
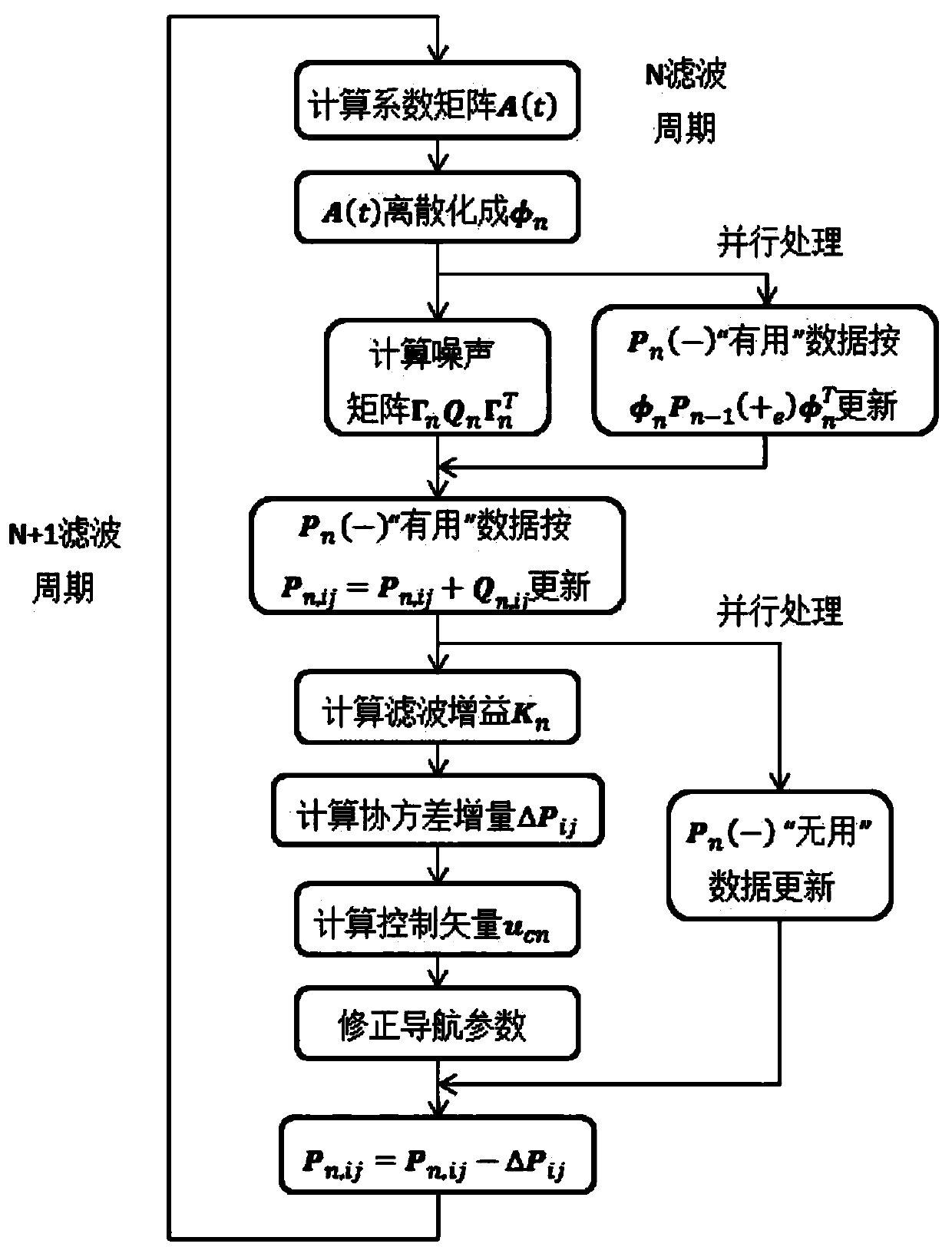
[0034] Combine below figure 1 and figure 2 The implementation process and main processing methods of the present invention are described in detail. The concrete steps of this method are as follows:
[0035] Step 1. Use the indirect method to filter, and directly give the system state equation:
[0036] x · ( t ) = A ( t ) x ( t ) + G ( t ) ω ( t ) Formula 1-1
[0037] Among them, the state error x(t), system white noise ω(t), coefficient matrix A(t), G(t) are:
[0038] Formula 1-2
[0039] Formula 1-3
[0040] A ( t ) = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More