System and method for magnet finding position of capsule endoscope in non-magnetic cavity
A capsule endoscope, non-magnetic technology, applied in the direction of radio detectors, gastroscopes, esophagus, etc. in the body, can solve the problems of not being too long, complicated process, difficult clinical application, etc., and achieve the effect of inability to accurately locate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
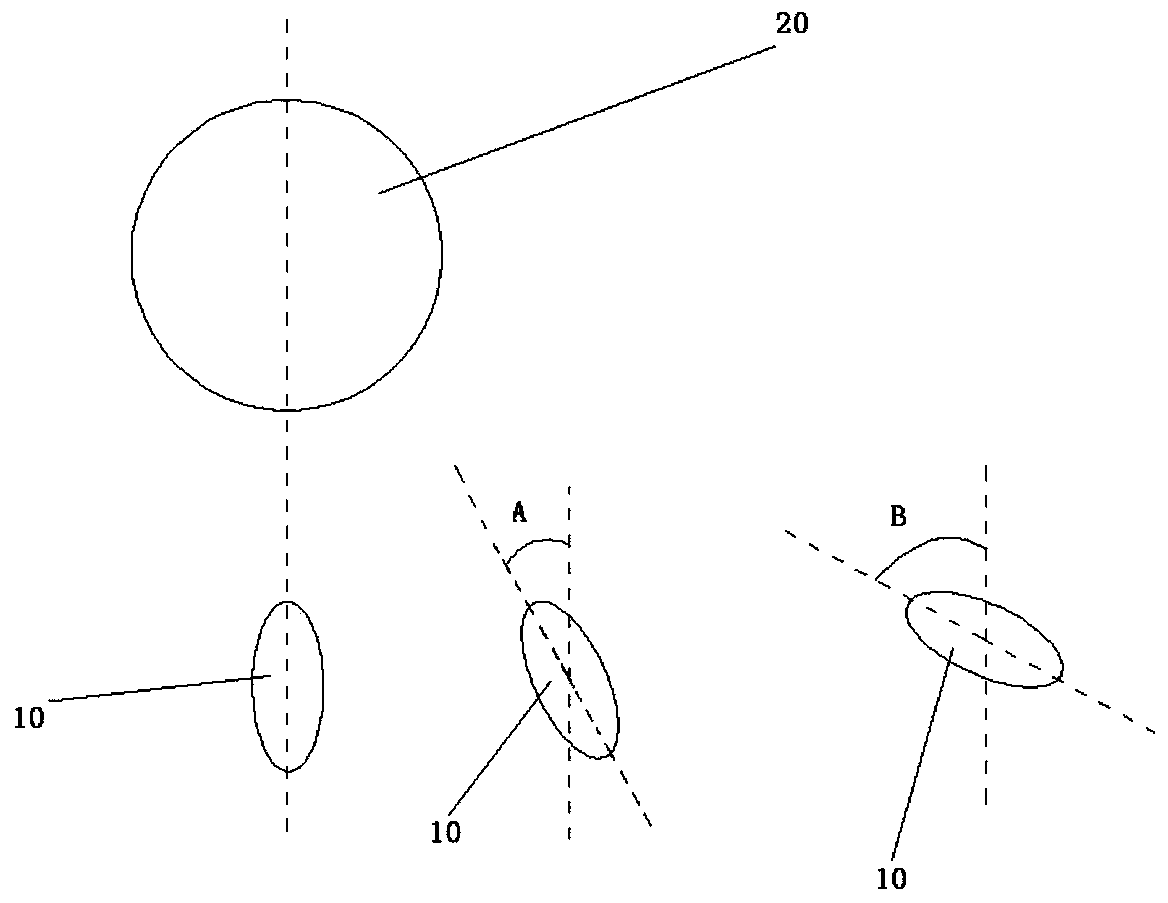
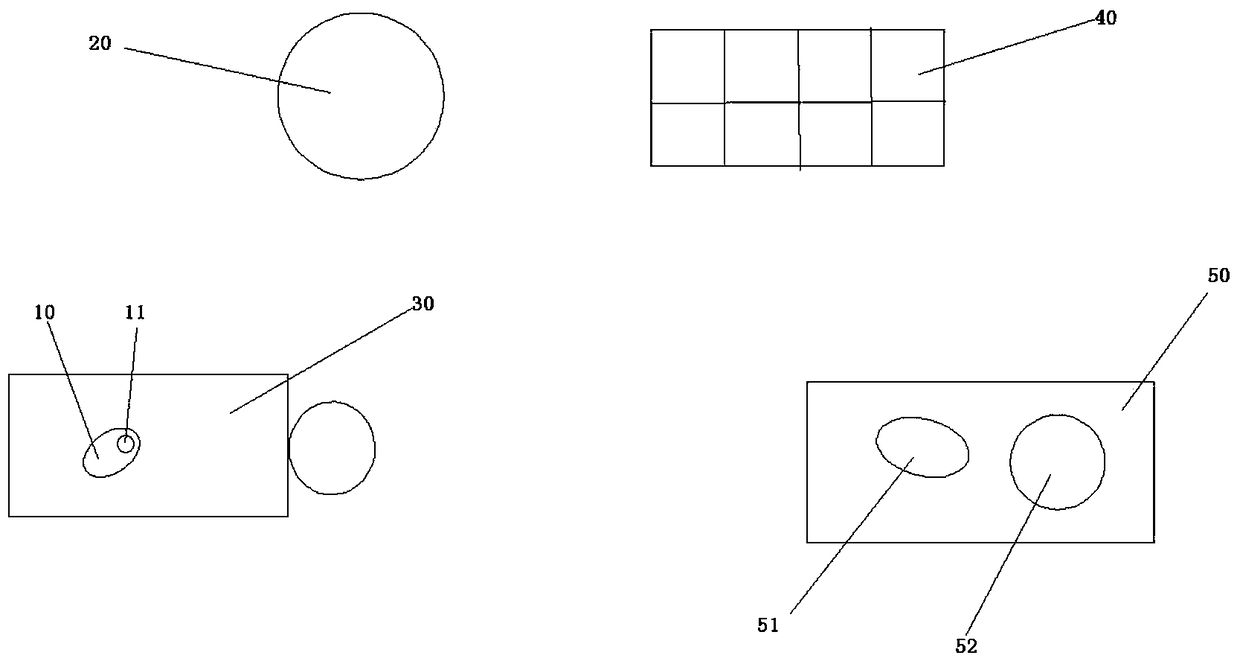
[0030] according to Figures 1 to 2 , the present invention provides a system for finding the position of a capsule endoscope in a non-magnetic cavity with a magnet, which includes a capsule endoscope 10, a magnetic object 20, a data recorder 50, a driving device 40 and an acceleration sensor. The capsule endoscope 10 contains a magnet 11 inside, and the capsule endoscope 10 is located in the non-magnetic cavity 30 . Both the magnetic object 20 and the driving device 40 are located outside the non-magnetic cavity 30 , and the magnetic object 20 moves freely outside the non-magnetic cavity 30 driven by the driving device 40 .
[0031] Considering the influence of the gravity of the capsule endoscope 10 itself, the magnetic object 20 is located above the non-magnetic cavity 30 . The magnet 11 contained inside the capsule endoscope is preferably made into a cylinder or a cuboid, and the magnetization direction is parallel to the symmetrical central axis of the capsule endoscope ...
Embodiment 2
[0038] according to Figure 4 , the present invention provides a system for finding the position of a capsule endoscope in a non-magnetic cavity with a magnet. The three-axis motor 40.1 is divided into three parts and installed on different parts of the frame 60. The human body 30.1 is located under the magnetic object 20 and The shape of the magnetic object is circular, the capsule endoscope 10 is located in the body of the human body 30.1 and contains the magnet 11, the servo 52 is located below the human body 30.1, and the gravity sensor 51.1 is located inside the capsule endoscope 10.
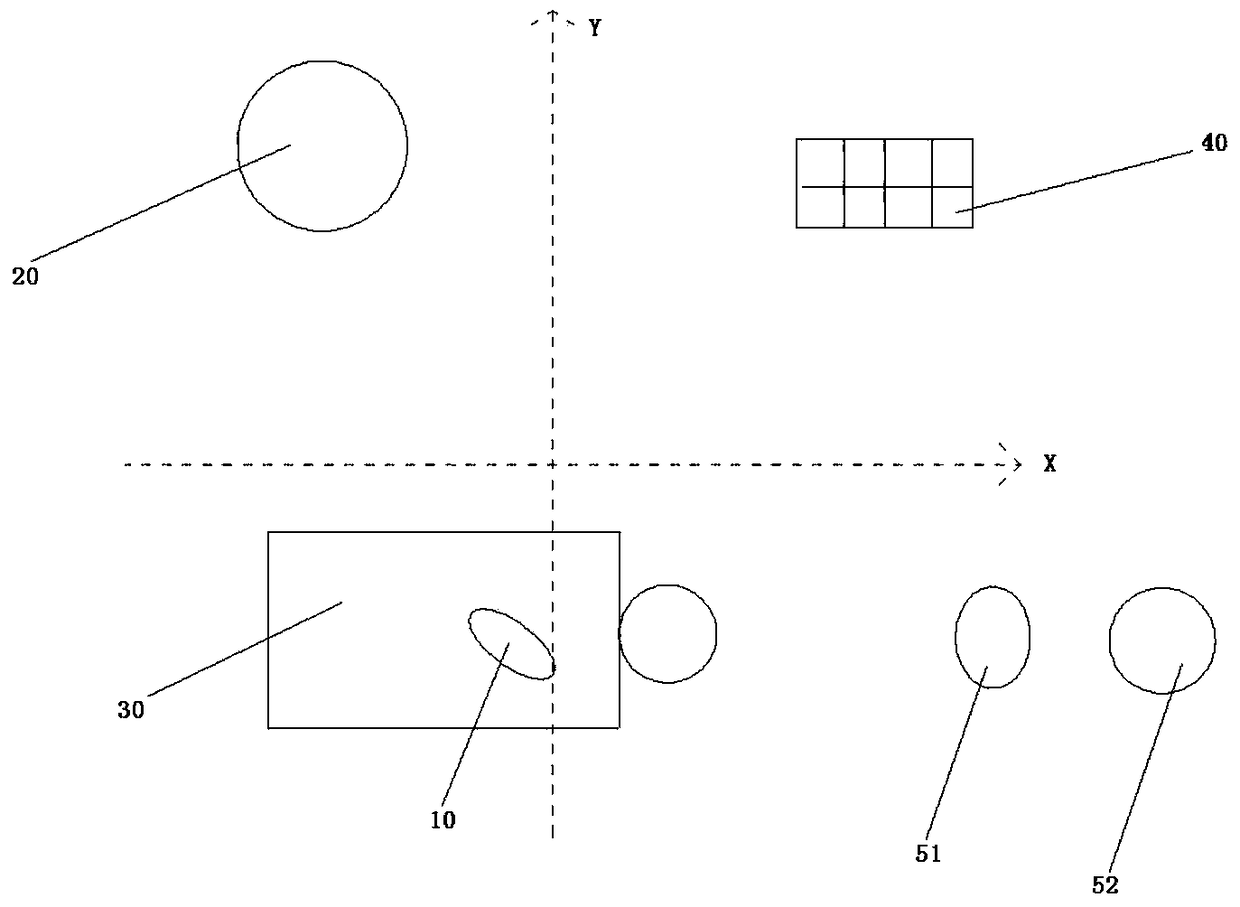
[0039] First, the three-axis motor 40.1 is used to adjust the self-rotation of the magnetic object 20 so that the magnetization direction of the magnetic object 20 is perpendicular to the horizontal plane. The angle between the cut plane and the vertical plane is the magnetic declination. Next, assume that there are two intersecting axes X-axis and Y-axis on the horizontal plane, the prefe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com