

A Verification Method of Space Manipulator Collision Algorithm Based on Microgravity Simulation System
A microgravity simulation and space manipulator technology, applied in the field of space manipulator collision algorithm verification, to achieve the effect of preventing dragging force and accurate acquisition results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention proposes a method for verifying the collision algorithm of a space manipulator based on a microgravity simulation system. The specific implementation method of the present invention will be described in detail below with reference to the accompanying drawings.
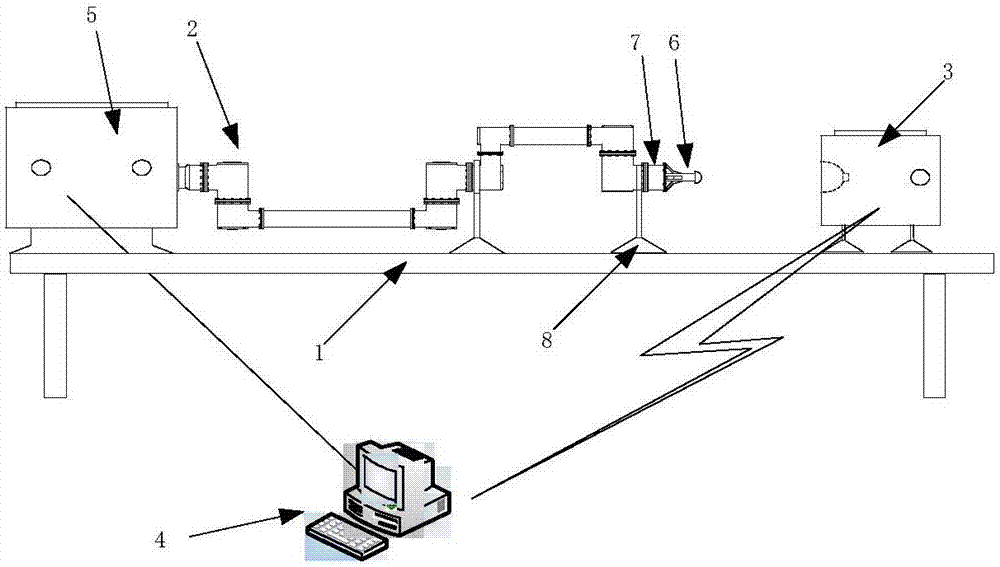
[0034] The microgravity simulation system that the present invention relies on is as figure 1 shown. The manipulator system (2) is fixed on the base (5), and is in contact with the platform through the air foot (8). It can simulate the free-floating state of space to a certain extent; the docking rod (6) is made of aerospace aluminum, and the end of the docking rod is designed as a ball head to achieve a smooth collision; the six-dimensional force sensor and the acceleration sensor (7) can Real-time collection of collision force / moment and acceleration data during the docking collision process, and transmit the data to the industrial computer for data analysis.
[0035] The target star s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More